
Con questo progetto potrete realizzare il robot utilizzato nelle Olimpiadi Robotiche.
Il robot R-Evolution è l’evoluzione del Robot PrintBot Evolution della BQ.
NOTE: di questo progetto non troverete lo schema di collegamento dei componenti ne sketch di esempio (se non per quanto riguarda il calcio a fine pagina) perché questo robot è utilizzato durante le gare nelle Olimpiadi Robotiche e le scuole partecipanti devono gestire in automìnomia connessioni e sketch.
Di seguito potrete scaricare i file STL dei pezzi cliccando sulle immagini.
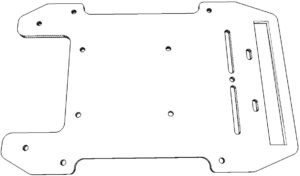
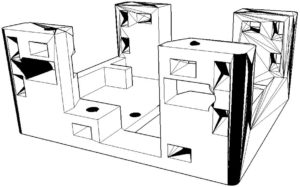
Il telaio.
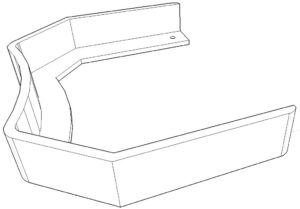
 Il paraurti per utilizzare il Robot con il Robo-Calcio e Mini-Sumo (da montare sotto il telaio).
Il paraurti per utilizzare il Robot con il Robo-Calcio e Mini-Sumo (da montare sotto il telaio).
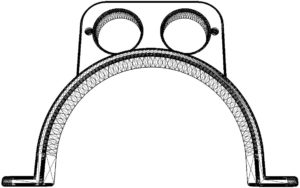
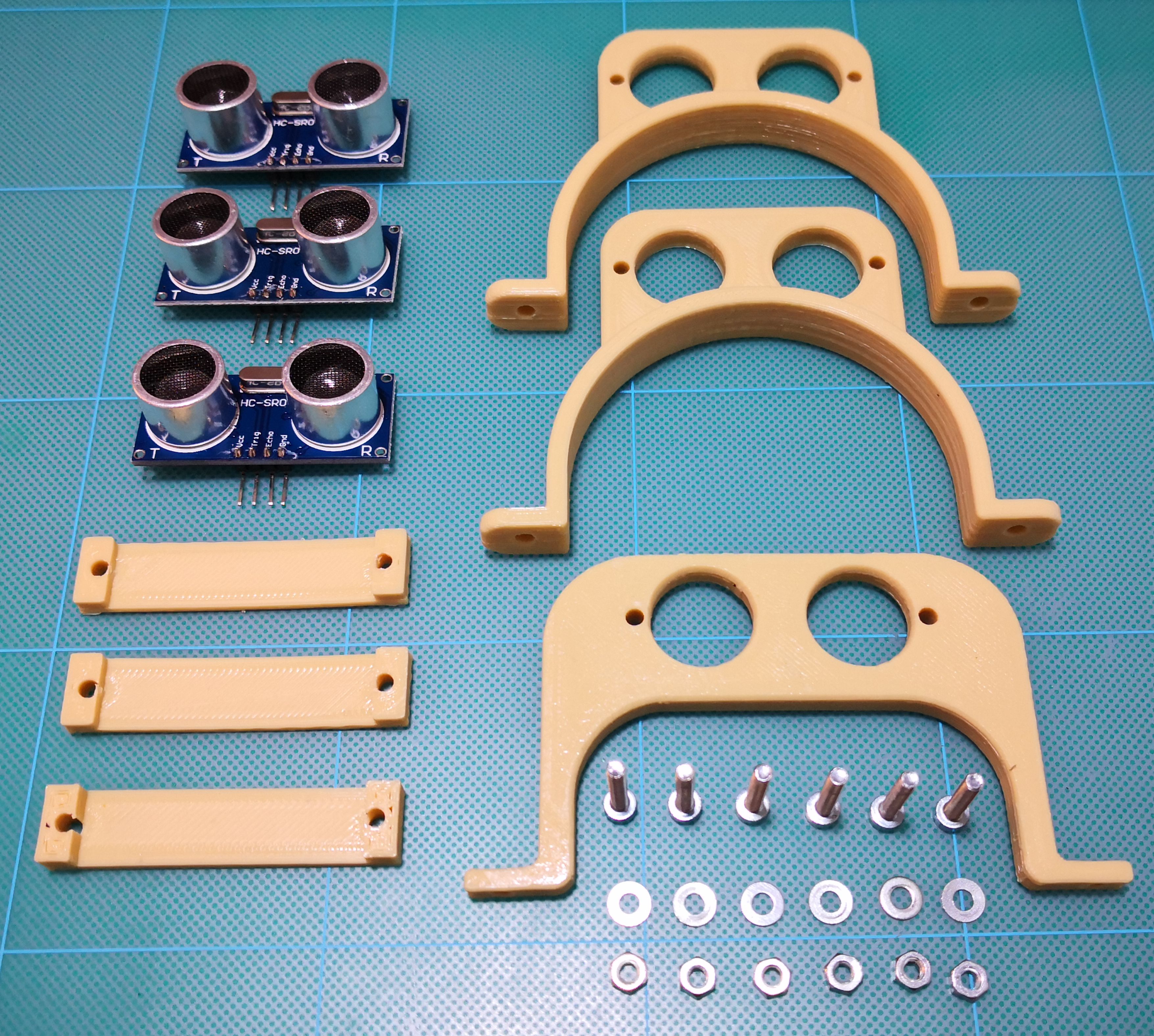
 Parafango con il supporto per il modulo ultrasuoni HC-SR04 per utilizzare il Robot con Robo-Labirinto e Mini-Sumo.
Parafango con il supporto per il modulo ultrasuoni HC-SR04 per utilizzare il Robot con Robo-Labirinto e Mini-Sumo.
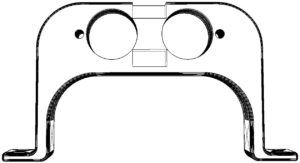
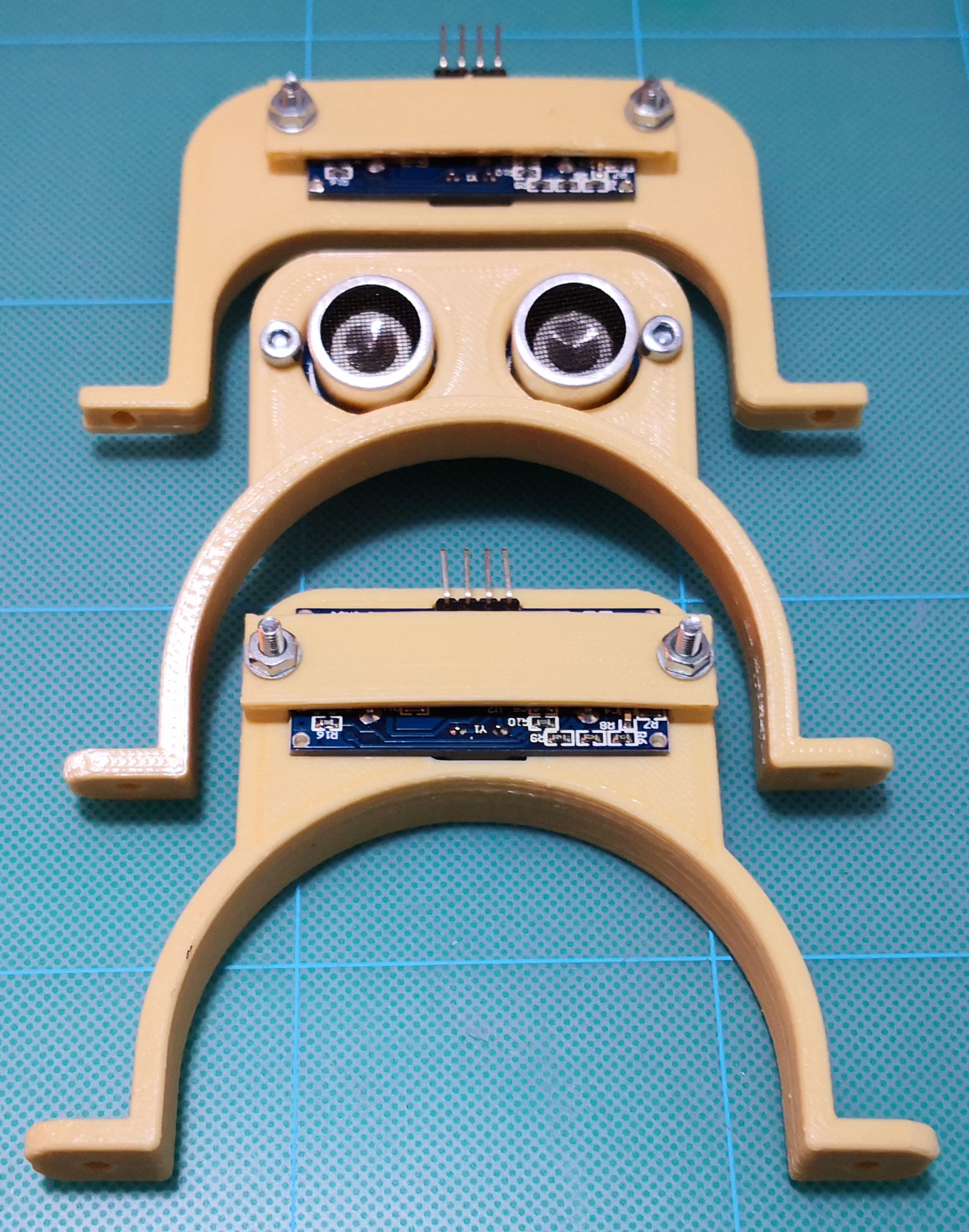
 Supporto frontale per il modulo ultrasuoni HC-SR04 per utilizzare il Robot con Robo-Labirinto e Mini-Sumo.
Supporto frontale per il modulo ultrasuoni HC-SR04 per utilizzare il Robot con Robo-Labirinto e Mini-Sumo.
 Staffa per bloccare il modulo ad ultrasuoni HC-SR04.
Staffa per bloccare il modulo ad ultrasuoni HC-SR04.
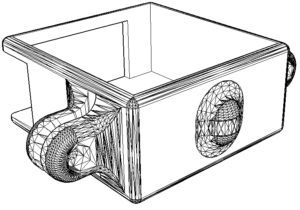
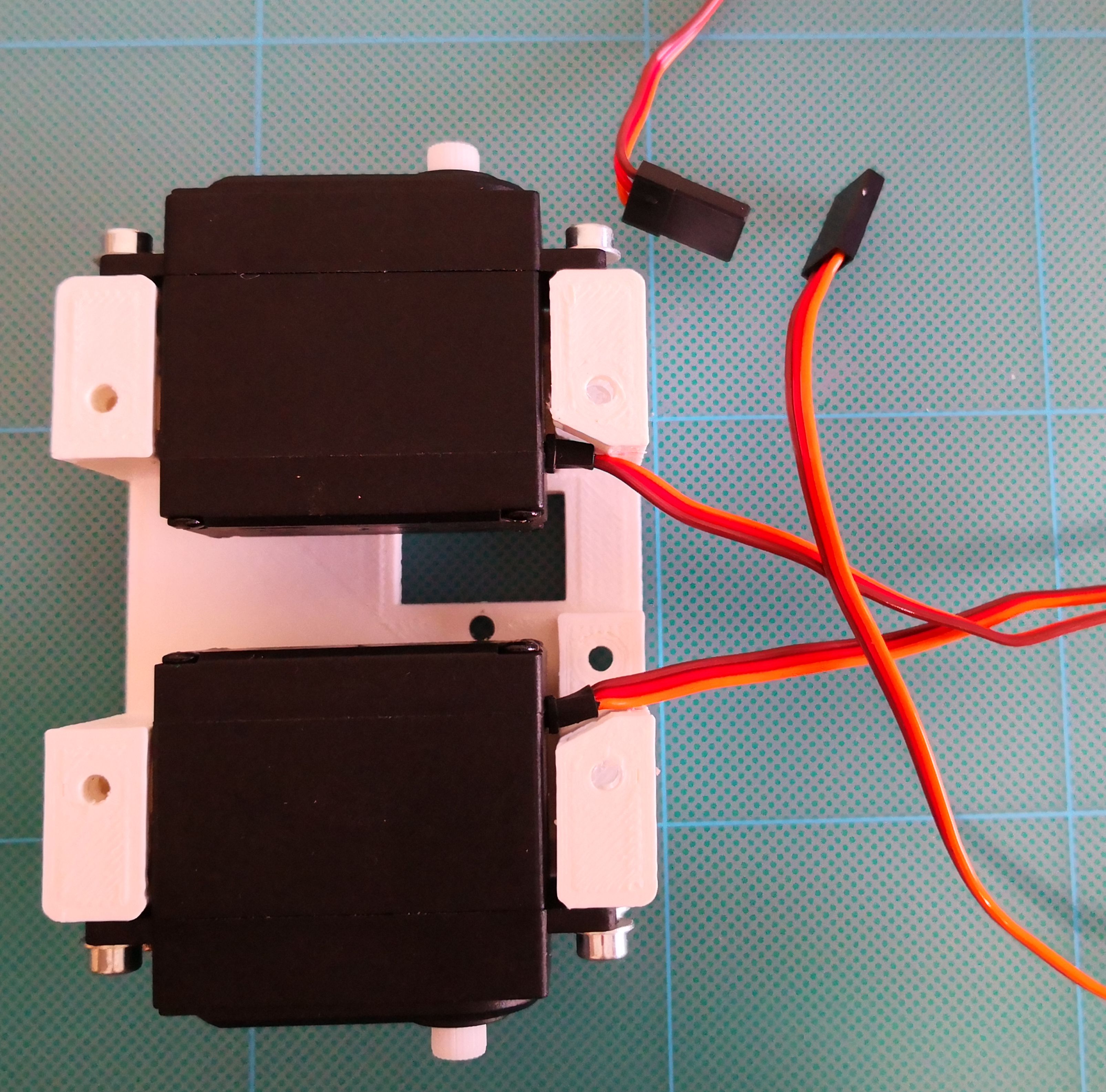
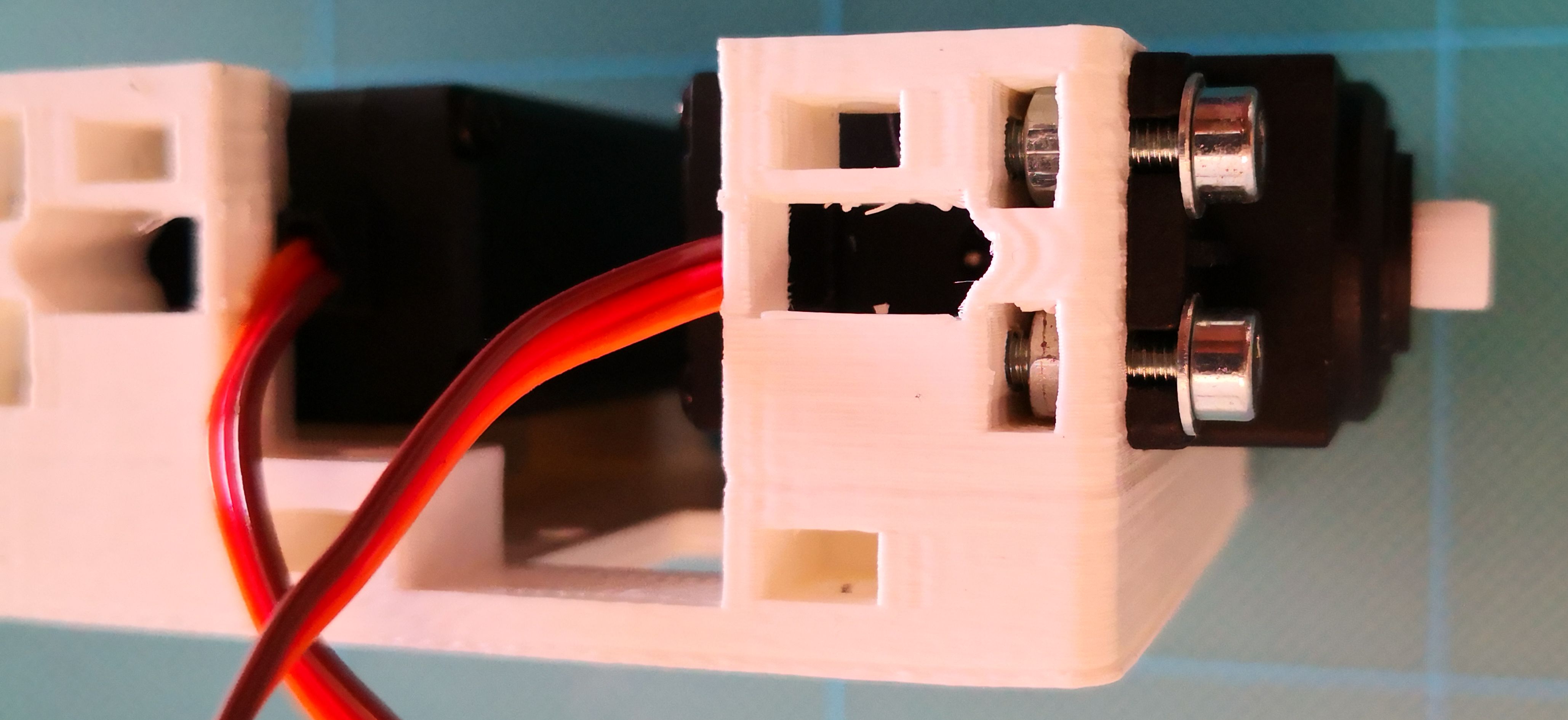
 Supporto motori
Supporto motori
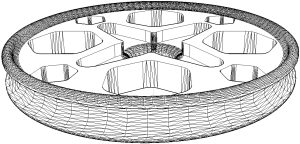
 La ruota
La ruota
 Il copriruota
Il copriruota
 Supporto per portapile litio 18650
Supporto per portapile litio 18650
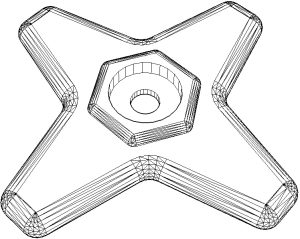
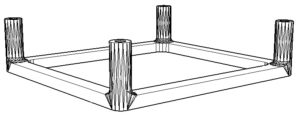
 Piedistllo per Robot Revolution, che può essere utilizzato per sollevare il robot durante la programmazione
Piedistllo per Robot Revolution, che può essere utilizzato per sollevare il robot durante la programmazione
Come motore si utilizzano due Servo-Motori Continui mod. SM-S4303R oppure i più veloci AR-3606HB.
Nota: Solitamente i Servo-Motori Continui sono tarati per stare fermi con la posizione 90 della libreria Servo di Arduino. Nel caso in cui alla posizione 90 i motori dovessero ruotare si deve agire DELICATAMENTE sul piccolo trimmer presente sul fianco del servo stesso fino ad arrestarli. Il trimmer serve quindi alla taratura della posizione di stop e non alla variazione della velocità!
Qui potrete scaricare lo sketch per testare i motori.

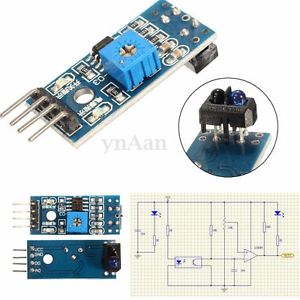
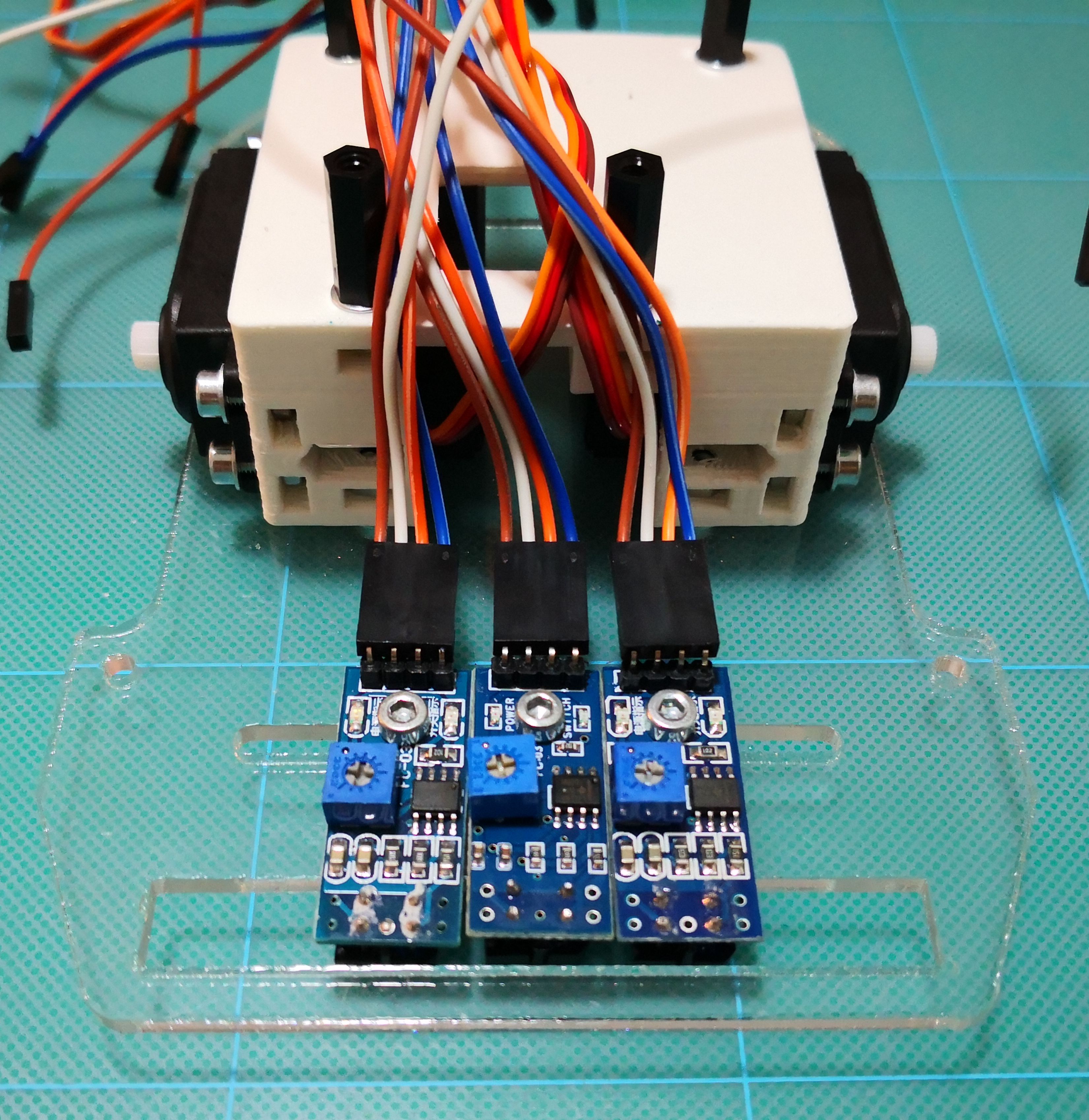
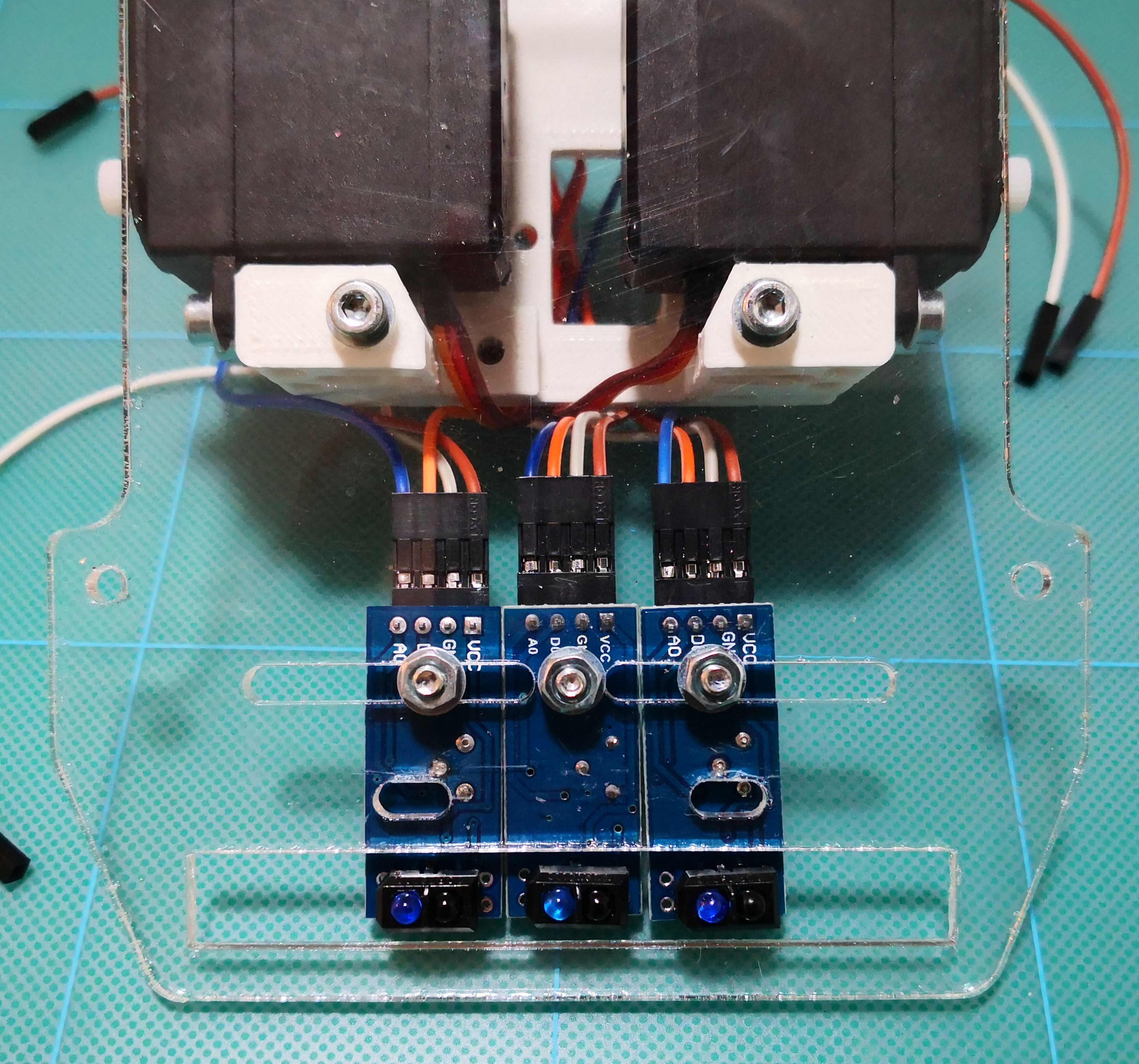
Come sensori di Line Follower si possono montare due o tre TCRT5000.
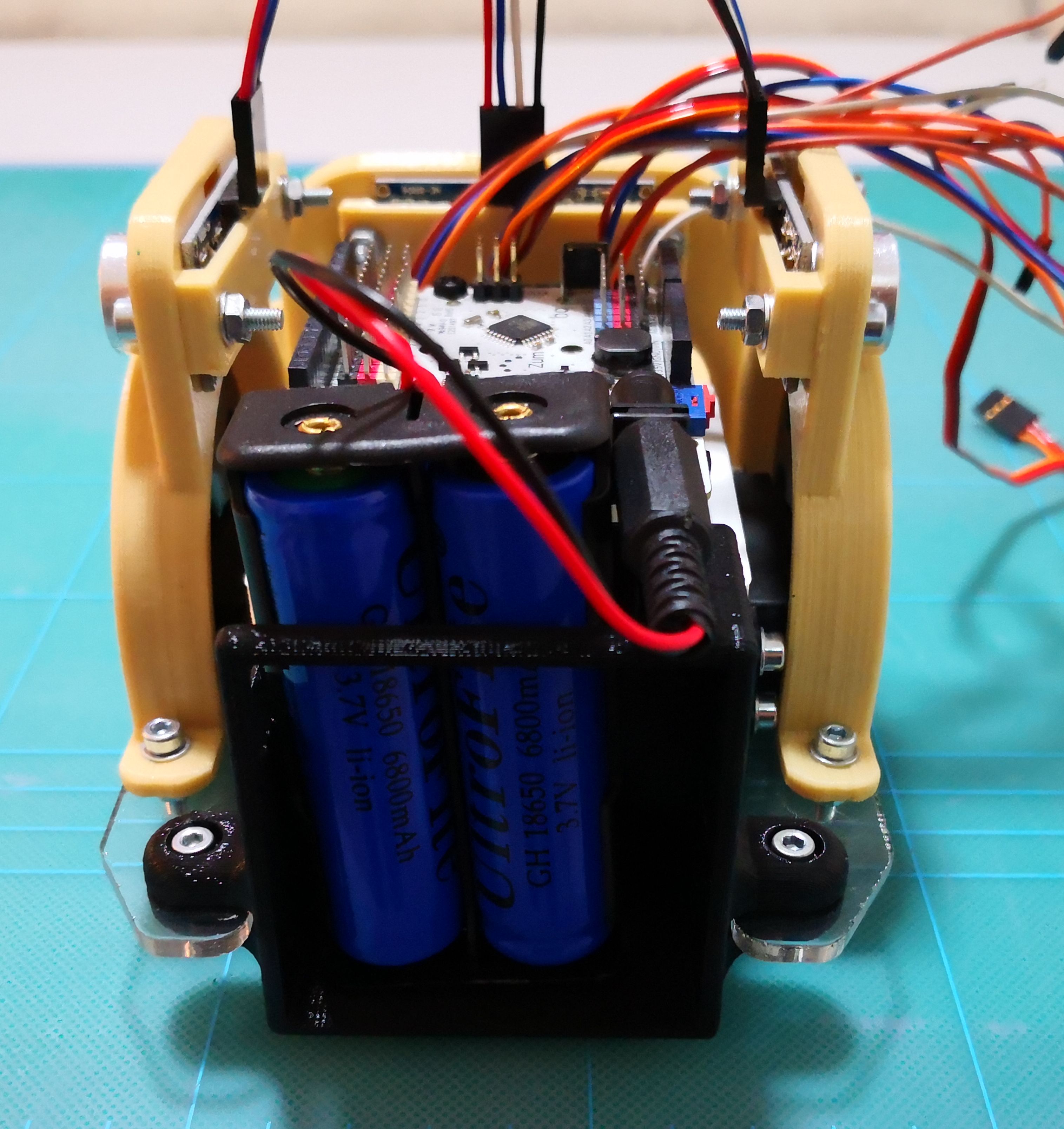
Inoltre occorrerà anche un Porta Pile da 8 ministilo AAA o in alterativa uno da due batterie litio ricaricabili 18650.
Per poter evitare gli ostacoli o predisporre il robot alla competizione Sumo-Robot si utilizzano i moduli ad ultrasuoni HC-SR04.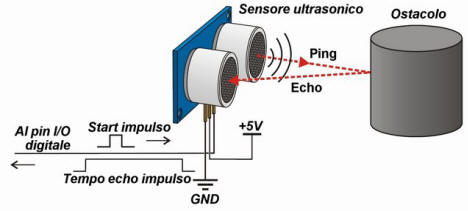
Qui potrete scaricare lo sketch per testare il modulo ultrasuoni HC-SR04 (verificate i pin richiamati nello sketch prima di caricarlo sulla scheda).
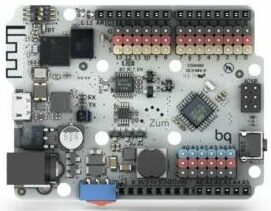
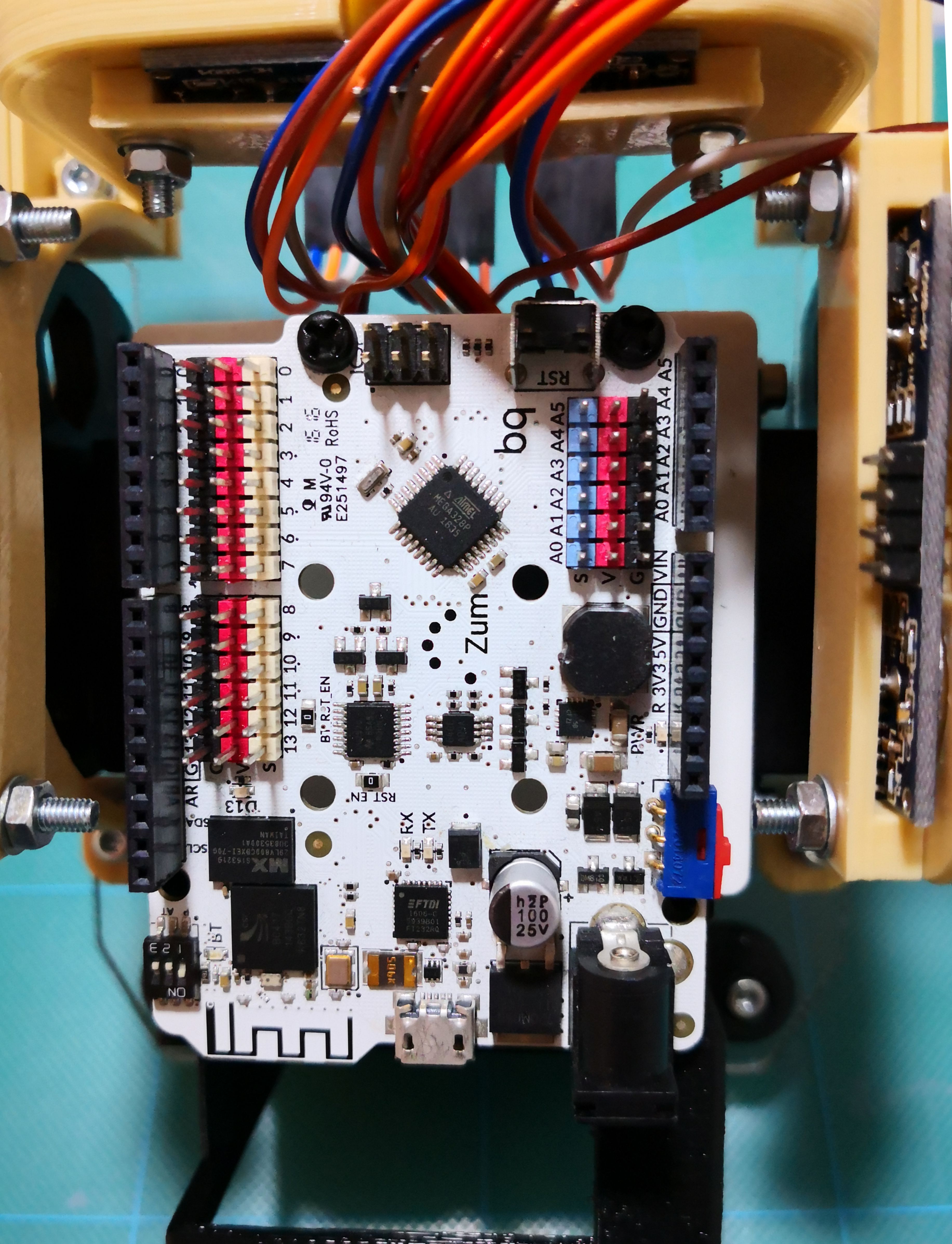
Il cervello del Robot del kit originale è costituito da una versione customizzata dalla bq di un Arduino Bluetooth, la Zum Core.
(Per chi avesse problemi ad installare i driver della scheda Zum Core Rev 1.0 qui ci sono gli screenshot dei passaggi da eseguire).
Se utilizzate la scheda Zum Core Rev 2.0 vi consiglio di leggere l’articolo che troverete qui.
ZUM CORE 1.0
 ZUM CORE 2.0
ZUM CORE 2.0
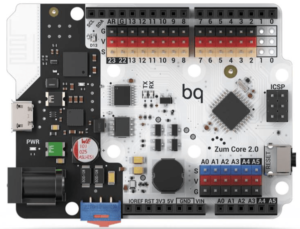 Il vantaggio di utilizzare queste schede, oltre al Bluetooth integrato, è dato dal fatto che sono stati aggiunti tre connettori per ogni Pin in/out di Arduino riportanti il GND (connettore nero), +5V da 3 Ampere) (connettore rosso, alimentato solo il jack ed ad interruttore acceso) ed il Pin di Arduino corrispondente (connettore azzurro). Questo ci permette di collegare direttamente i Servo-Motori e i sensori senza la necessità di Shield o Breadbord.
Il vantaggio di utilizzare queste schede, oltre al Bluetooth integrato, è dato dal fatto che sono stati aggiunti tre connettori per ogni Pin in/out di Arduino riportanti il GND (connettore nero), +5V da 3 Ampere) (connettore rosso, alimentato solo il jack ed ad interruttore acceso) ed il Pin di Arduino corrispondente (connettore azzurro). Questo ci permette di collegare direttamente i Servo-Motori e i sensori senza la necessità di Shield o Breadbord.
ISTRUZIONI DI MONTAGGIO:
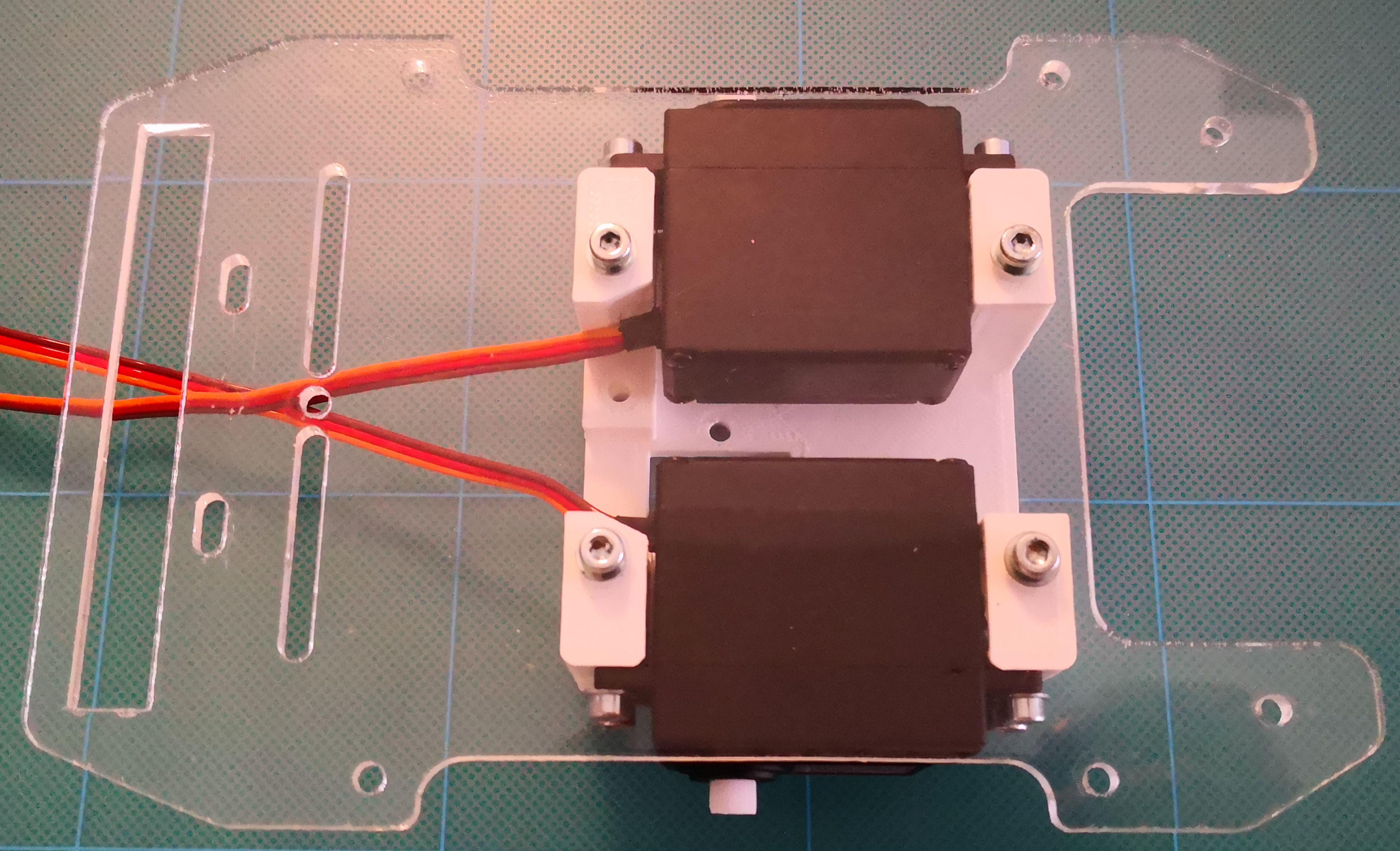
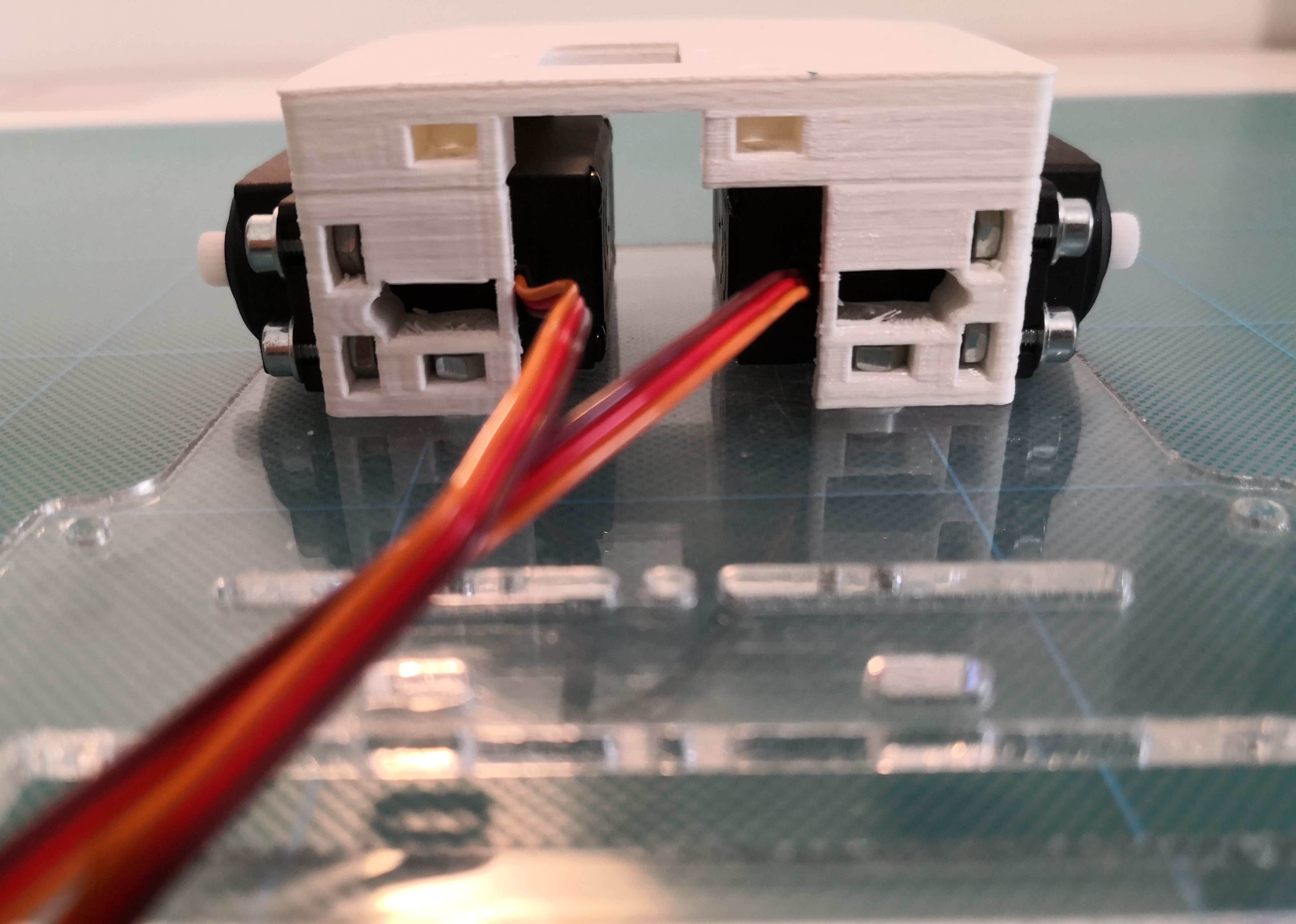
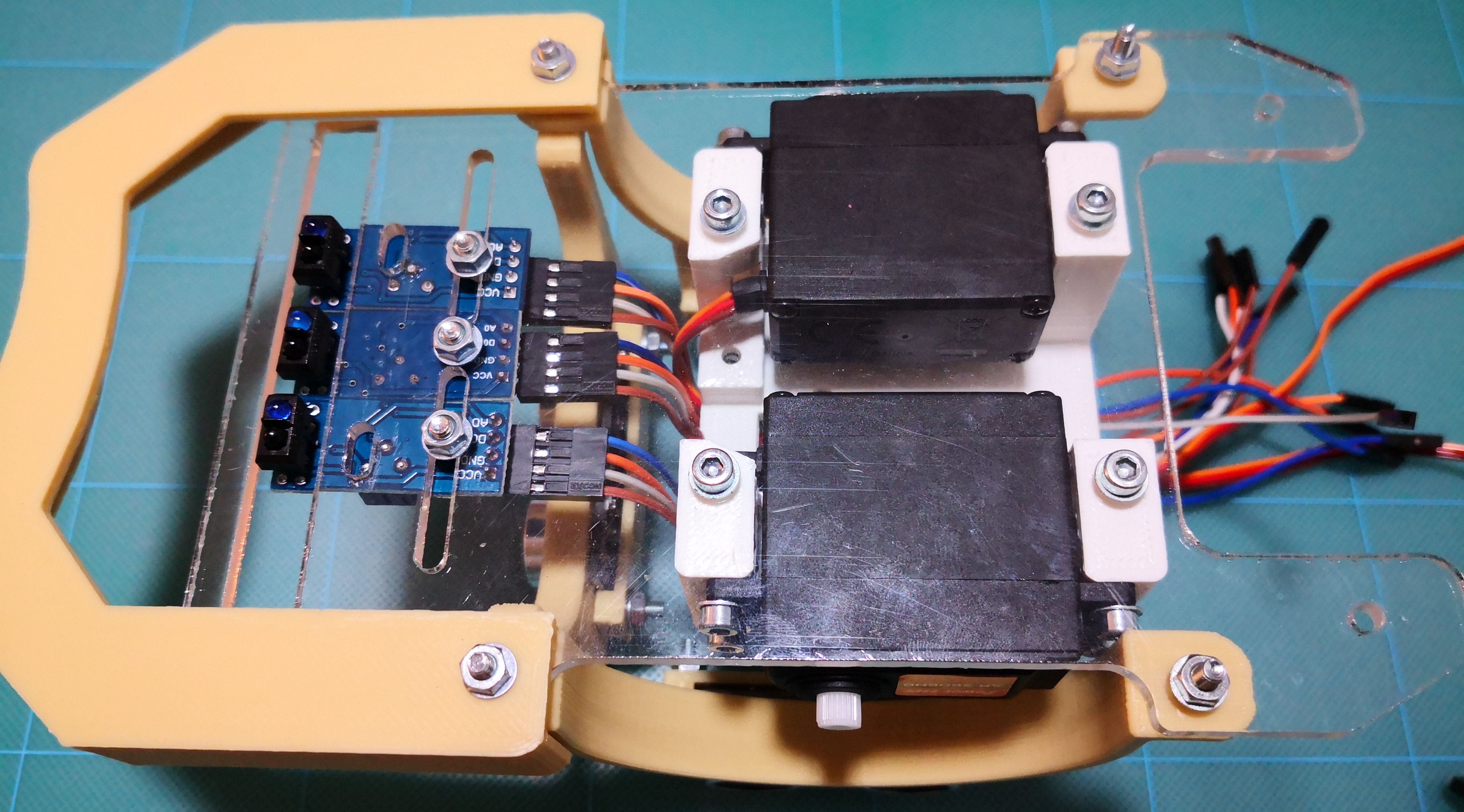
1) Prendere il supporto motori, i due Servo Continui, 6 x M3x10, 6 x M3 Rondelle, 6 x M3 Dadi Esagonali:

 2) Prendere il supporto motori, il telaio, 4 x M3x10, 4 x M3 Rondelle, 4 x M3 Dadi Esagonali:
2) Prendere il supporto motori, il telaio, 4 x M3x10, 4 x M3 Rondelle, 4 x M3 Dadi Esagonali:
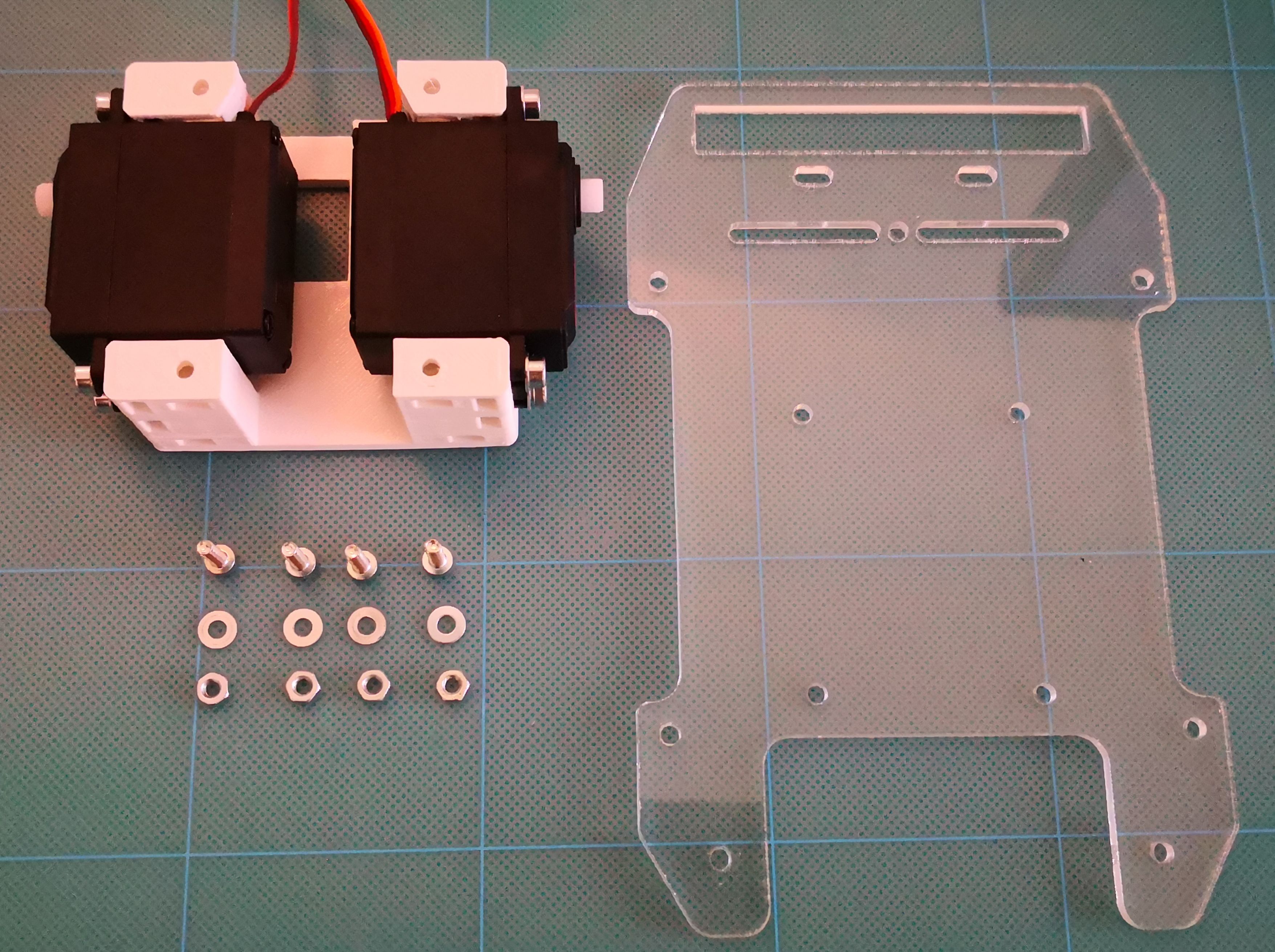
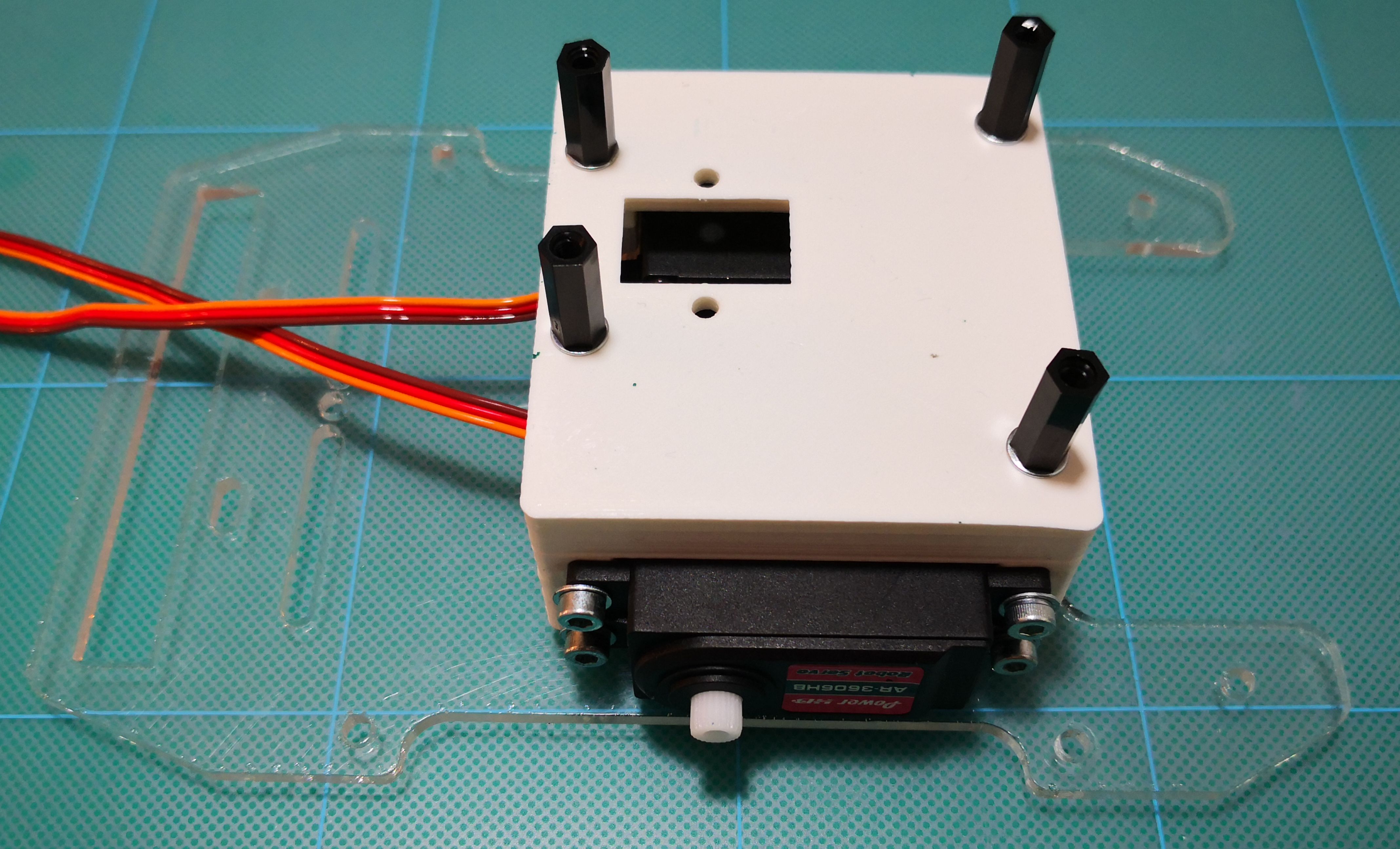
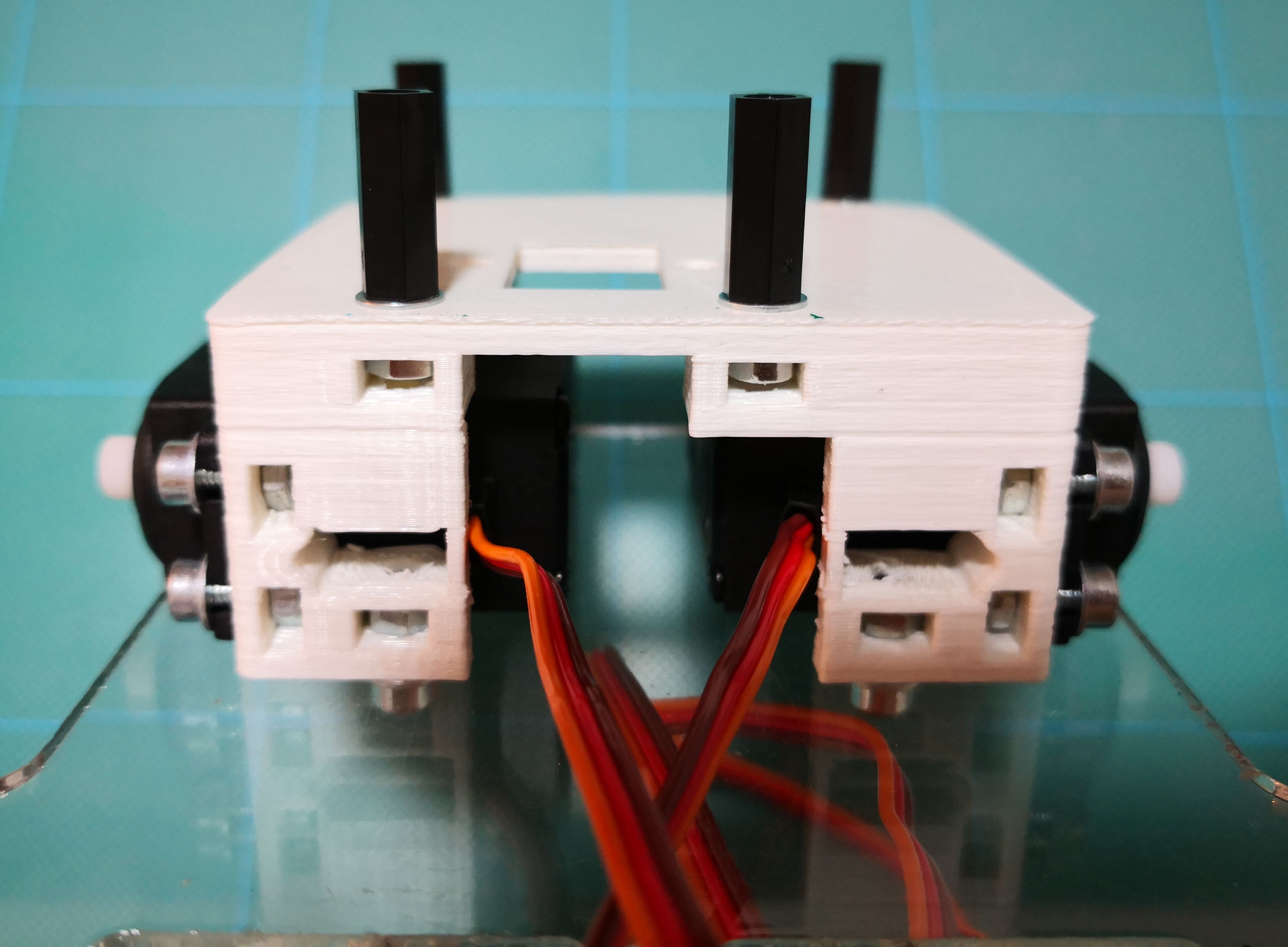
3) Prendere il Telaio con il Supporto Motori, 4 x M3x16 Colonnette in Plastica, 4 x M3 Rondelle, 4 x M3 Dadi Esagonali:

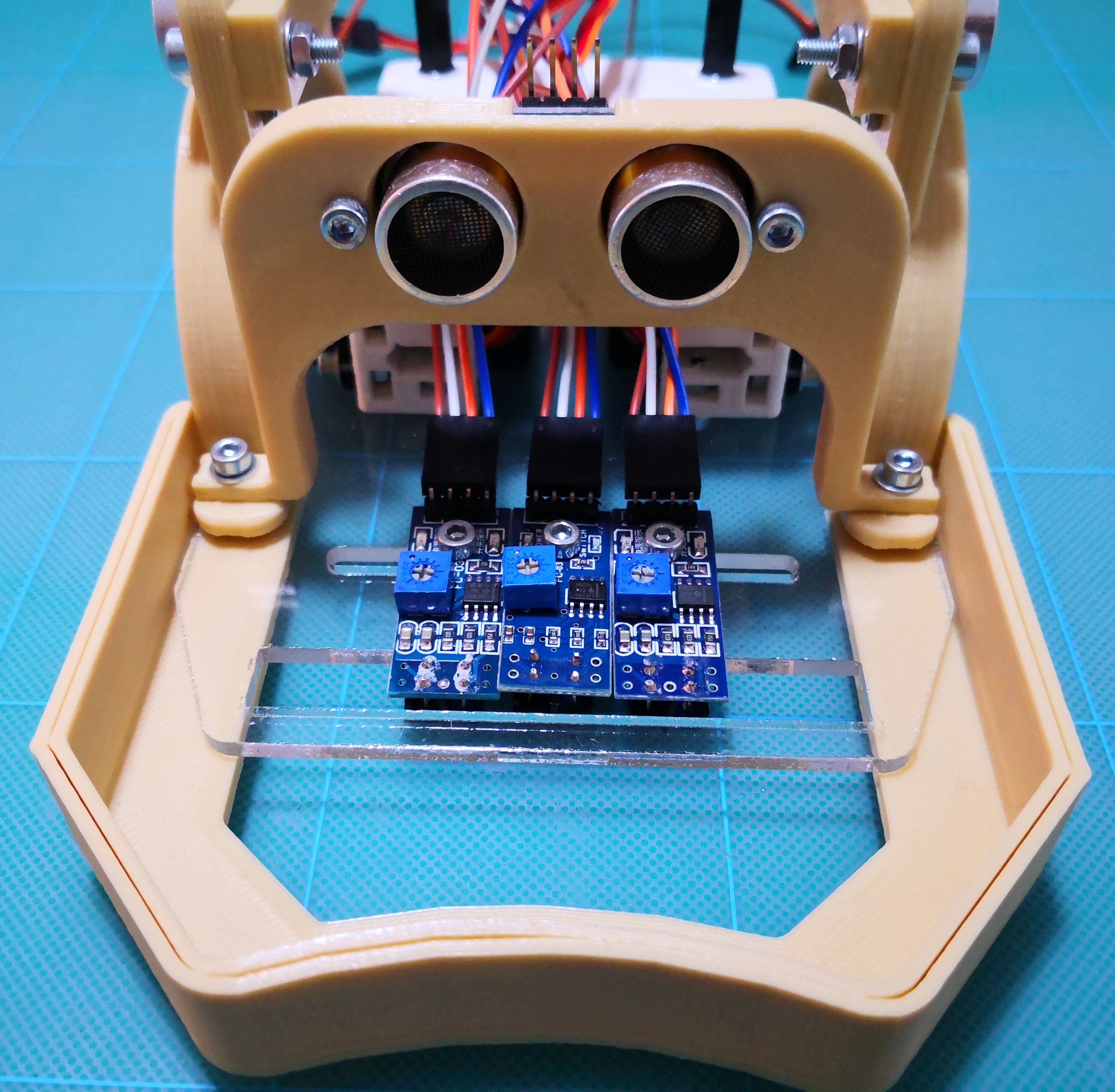
4) Prendere i 3 Sensori HC-SR04, i 2 Parafanghi, il Supporto Frontale, 3 Staffe Blocca Sensore, 6 x M3x16, 6 x M3 Rondelle, 6 x M3 Dadi Esagonali:
5) Prendere i 3 Sensori TCRT5000, i 3 cavetti di 20CM, 3 x M3x10, 3 x M3 Rondelle, 3 x M3 Dadi Esagonali:
 6) Prendere i 2 Parafanghi e il Supporto Frontale precedentemente dotati di Sensori Ultrasuoni, il Paraurti, il Telaio pre-assemblato, 2 x M3x18, 2 x M3x14, 8 x M3 Rondelle, 4 x M3 Dadi Esagonali:
6) Prendere i 2 Parafanghi e il Supporto Frontale precedentemente dotati di Sensori Ultrasuoni, il Paraurti, il Telaio pre-assemblato, 2 x M3x18, 2 x M3x14, 8 x M3 Rondelle, 4 x M3 Dadi Esagonali: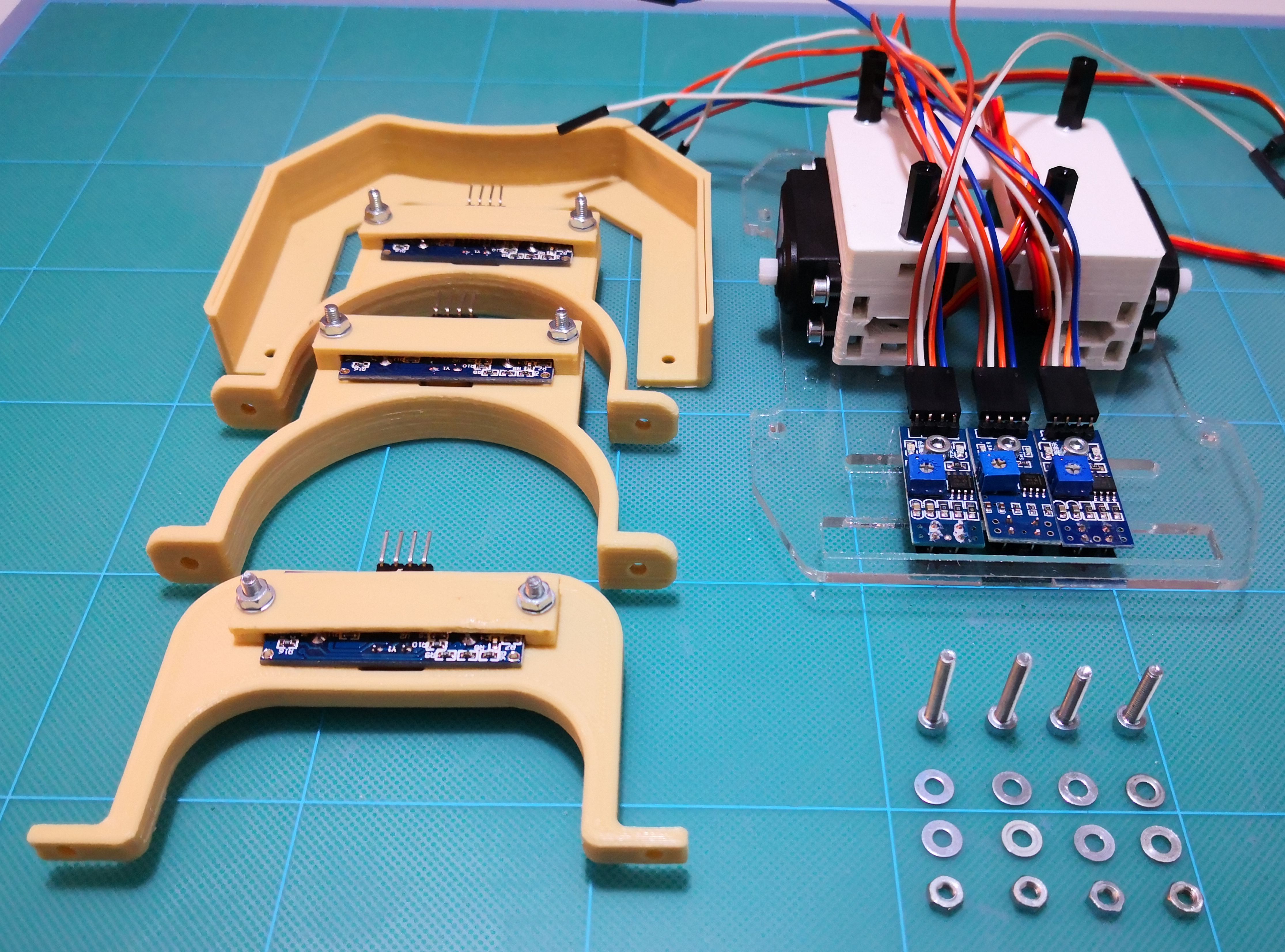
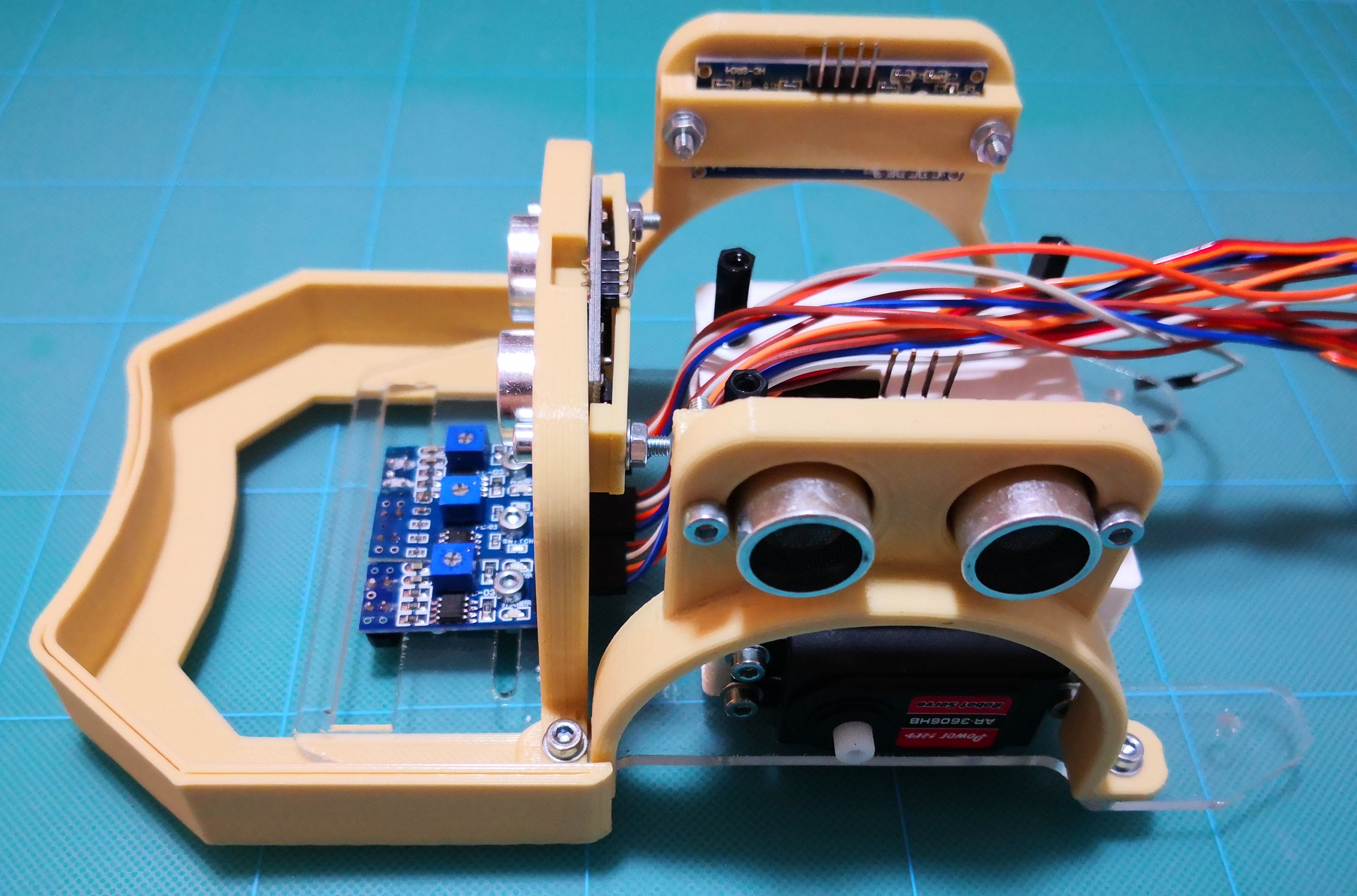
 NOTA SULLA FASE 6: Il Paraurti deve essere montato al di sotto del Telaio, in modo da essere velocemente rimosso per la prova del Robo-Labirinto.
NOTA SULLA FASE 6: Il Paraurti deve essere montato al di sotto del Telaio, in modo da essere velocemente rimosso per la prova del Robo-Labirinto.
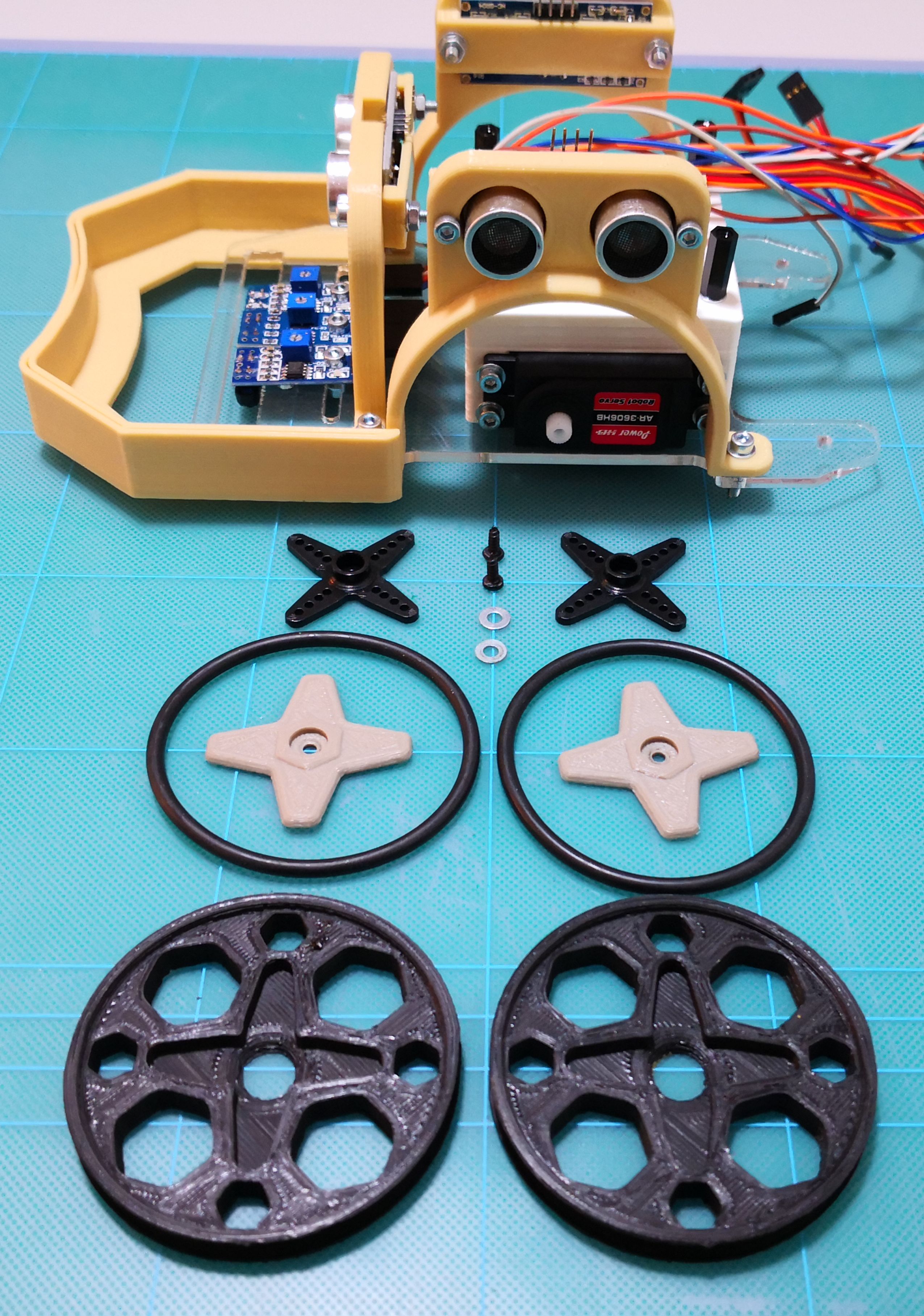
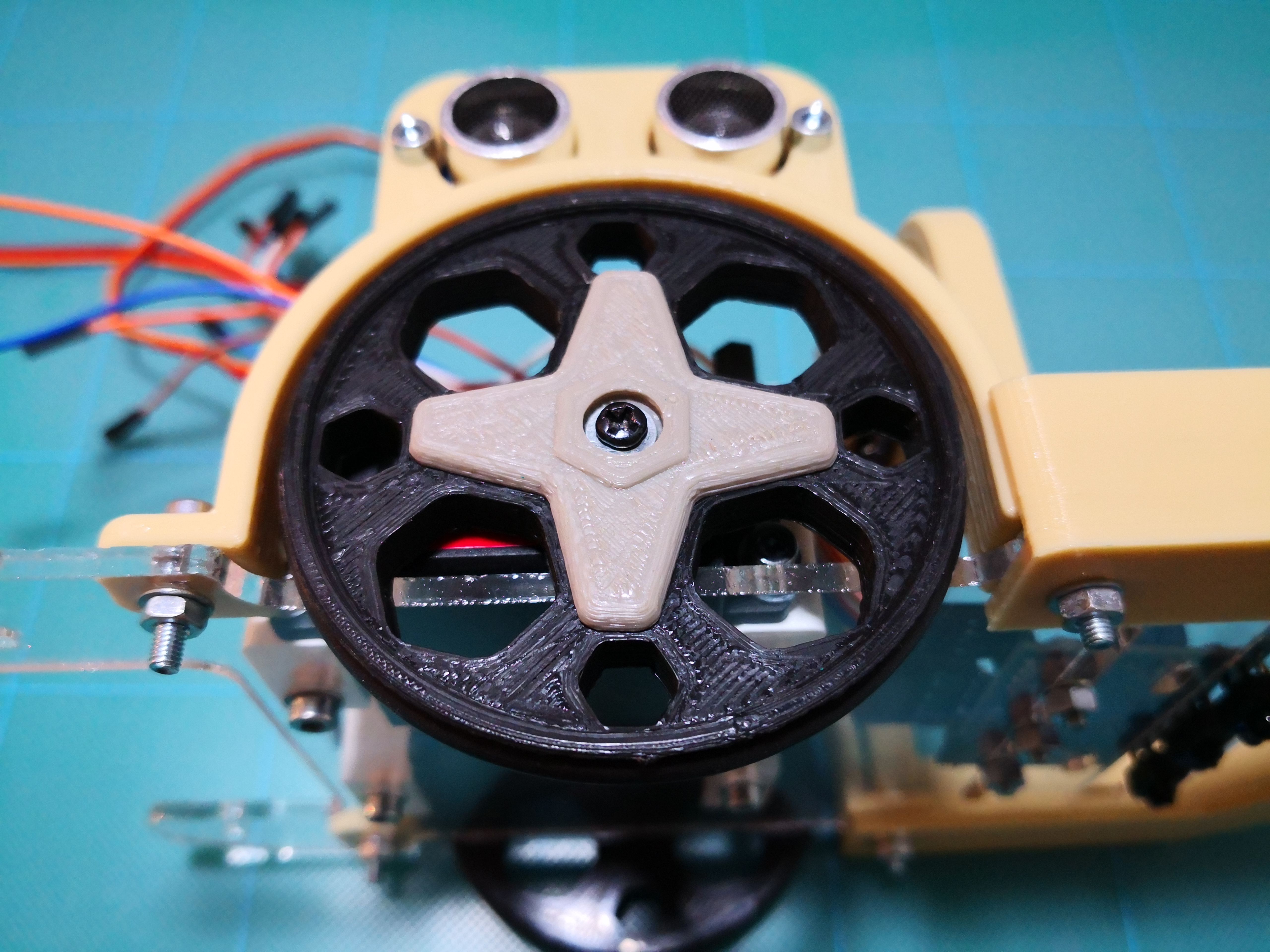
7) Prendere le 2 Ruote, i 2 Copriruote, i 2 O-Ring (Di 56mm d 4mm), 2 Supporti a X , 2 x M3 Rondelle, 2 x Viti Autofilettanti:


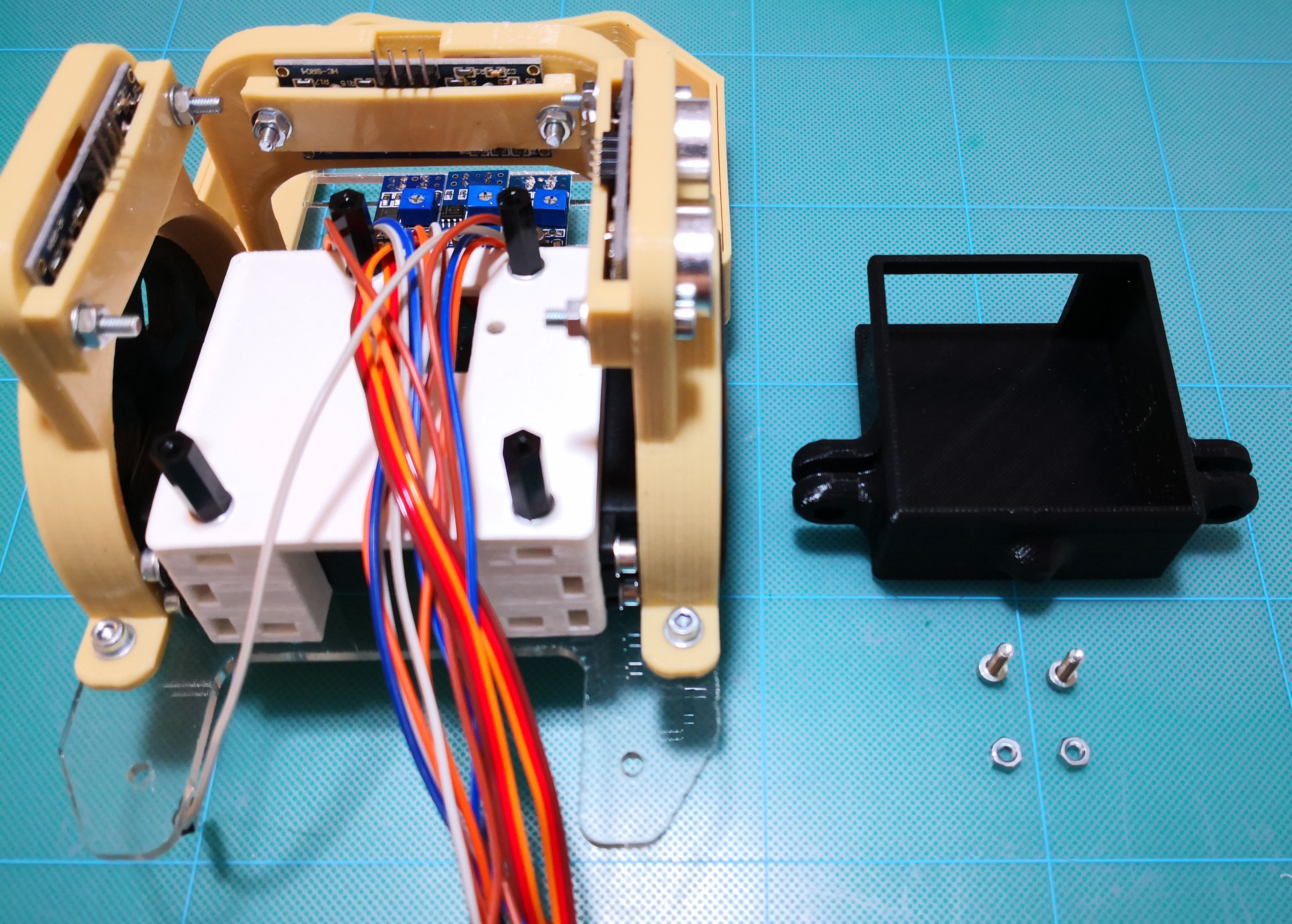
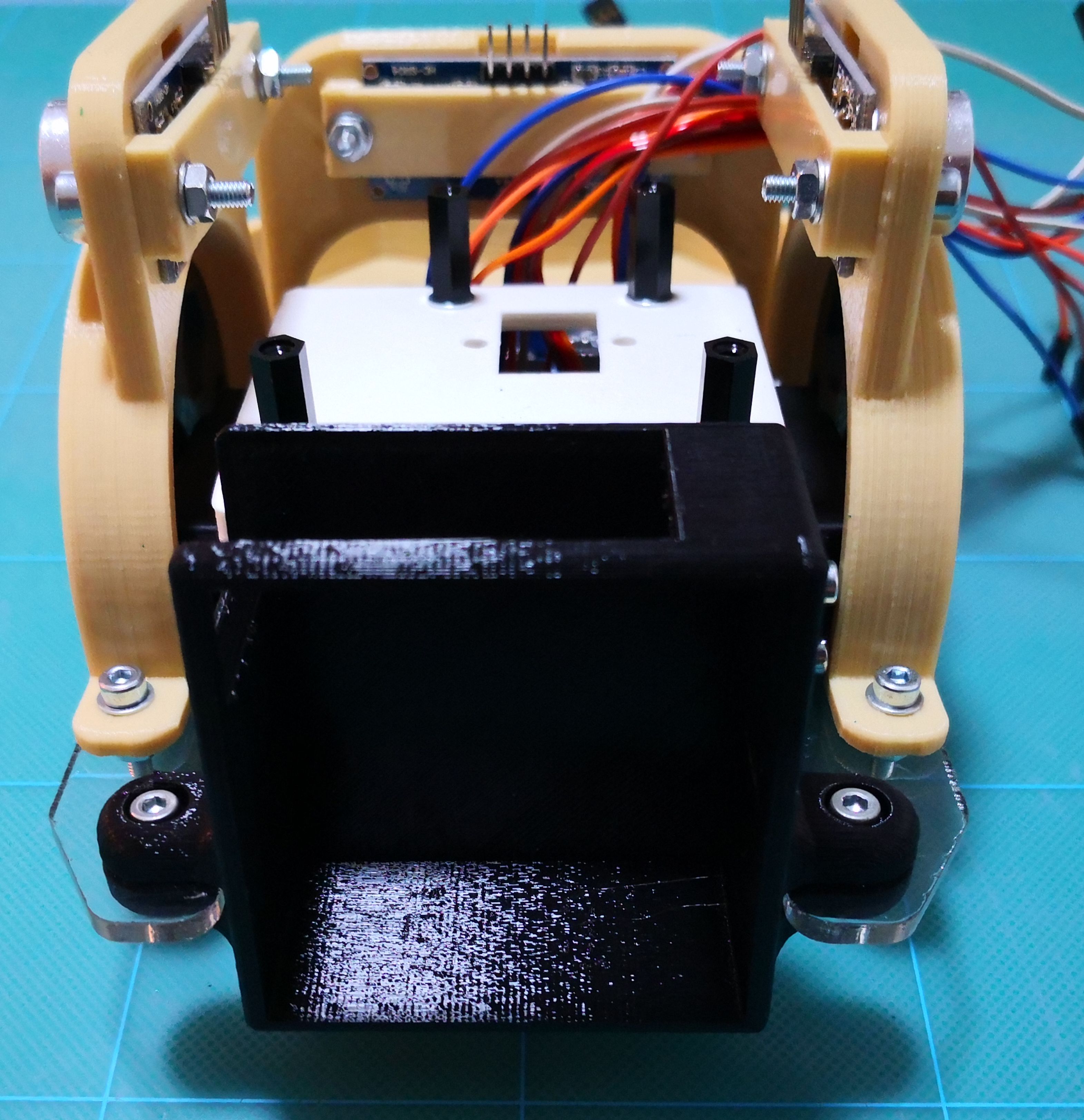
 8) Prendere il Supporto Batterie, 2 x M3 x 10, 2 x M3 Dadi Esagonali:
8) Prendere il Supporto Batterie, 2 x M3 x 10, 2 x M3 Dadi Esagonali:
 9) Prendere la Scheda ZUM, 2 x M3 x 8 in plastica:
9) Prendere la Scheda ZUM, 2 x M3 x 8 in plastica:
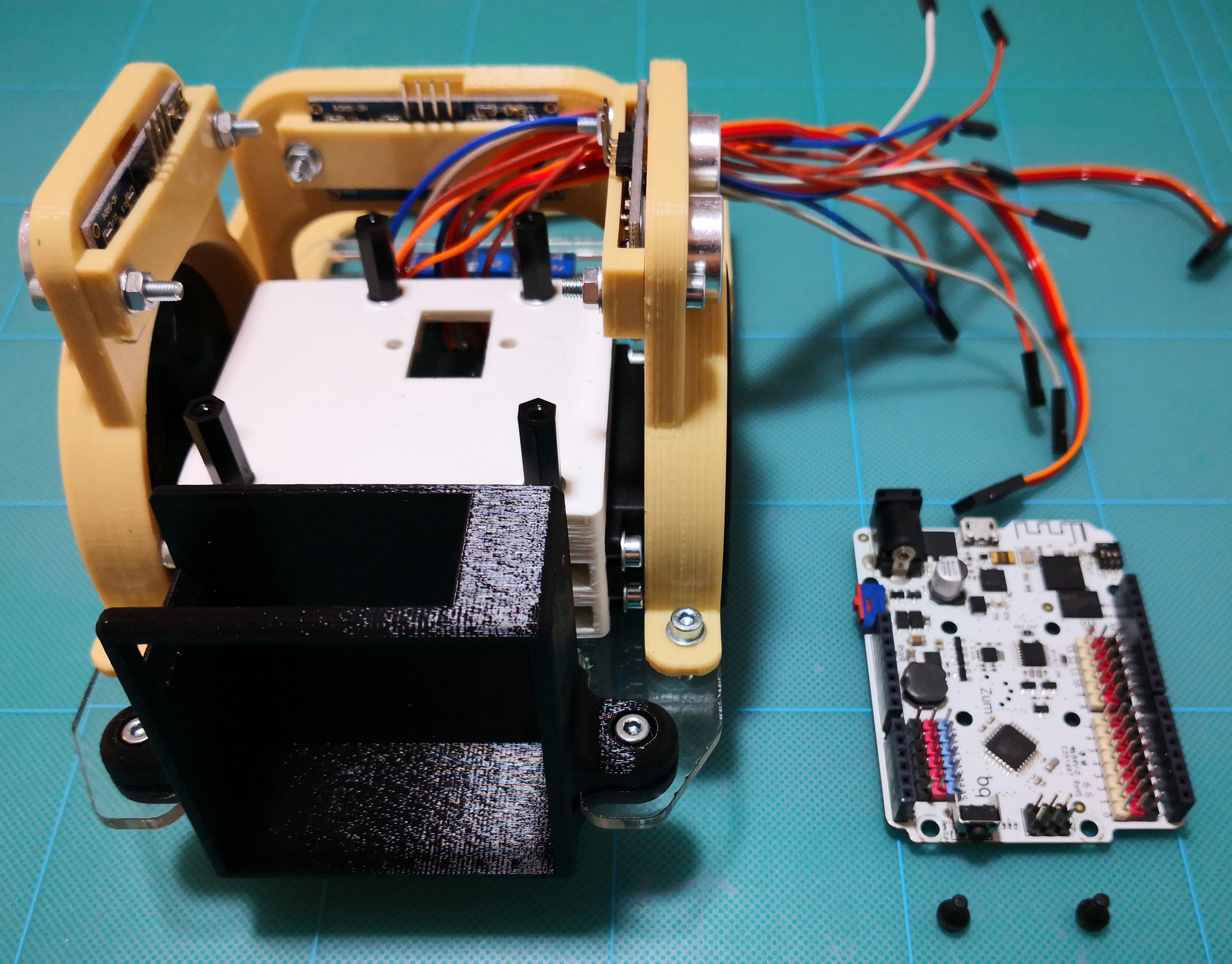
 NOTA SULLA FASE 9: Le viti dovranno essere messe con indicato nella foto, utilizzare solo le 2 viti in plastica.
NOTA SULLA FASE 9: Le viti dovranno essere messe con indicato nella foto, utilizzare solo le 2 viti in plastica.
10) Prendere i 3 cavetti di 10CM, il Supporto Batterie:


 NOTA: Prima di caricare sulla propria scheda i seguenti firmware verificate la corrispondenza dei pin ed il tipo di scheda che avete usato con quelli richiamati nel firmware...
NOTA: Prima di caricare sulla propria scheda i seguenti firmware verificate la corrispondenza dei pin ed il tipo di scheda che avete usato con quelli richiamati nel firmware...
Qui potrete scaricare il firmware per giocare a calcio (ZUM CORE 1.0).
Qui potrete scaricare il firmware per giocare a calcio (ZUM CORE 2.0).
Qui potrete scaricare l’apposita app per Android (da utilizzare con la scheda Zum Core 1.0 o con la scheda Zum Core 2.0 e Bluetooth esterno).
Qui potrete scaricare l’apposita app per Android (da utilizzare con la scheda Zum Core 2.0 e Bluetooth interno 4.2).