
ATTENZIONE GUIDA NON DEFINITIVA
Mini Braccio Robotico ARM con Arduino
Questo è il braccio robotico che utilizziamo durante le gare delle Olimpiadi Robotiche.
 Di questo braccio su internet se ne trovano varie versioni. Noi siamo partiti da questa per poi apportare varie modifiche e migliorie.
Di questo braccio su internet se ne trovano varie versioni. Noi siamo partiti da questa per poi apportare varie modifiche e migliorie.
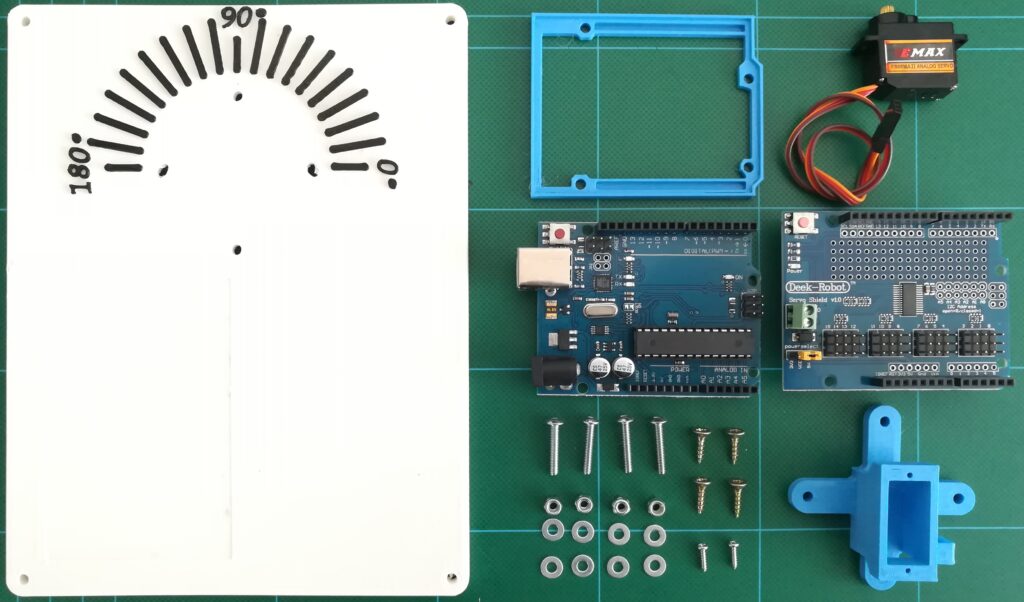
Oltre alle parti da stampare con una stampante 3D
i materiali necessari per relaizzare il braccio robotico sono:
– 5 servomotori EMAX ES08MA II
– 1 servomotore SG90
– 1 viti M2,3×10
– 2 viti M2,3×8
– 4 viti M3x16 a testa bombata
– 4 dadi M3 autobloccanti
– 8 rondelle M3
– 2 viti M3x12 per il legno
– 1 scheda Arduino
– 1 schield controllo motori con Chip PCA9685
– 1 alimentatore 5V – 5A con connettore 2,2 x 5,5 maschio
– 1 cavo con connettore 2,2 x 5,5 femmina per alimentare la schield
– 1 prolunga per servomotori di lunghezza 10 cm
– 1 Breadboard 400 punti
– 1 base di legno o stampata 3D
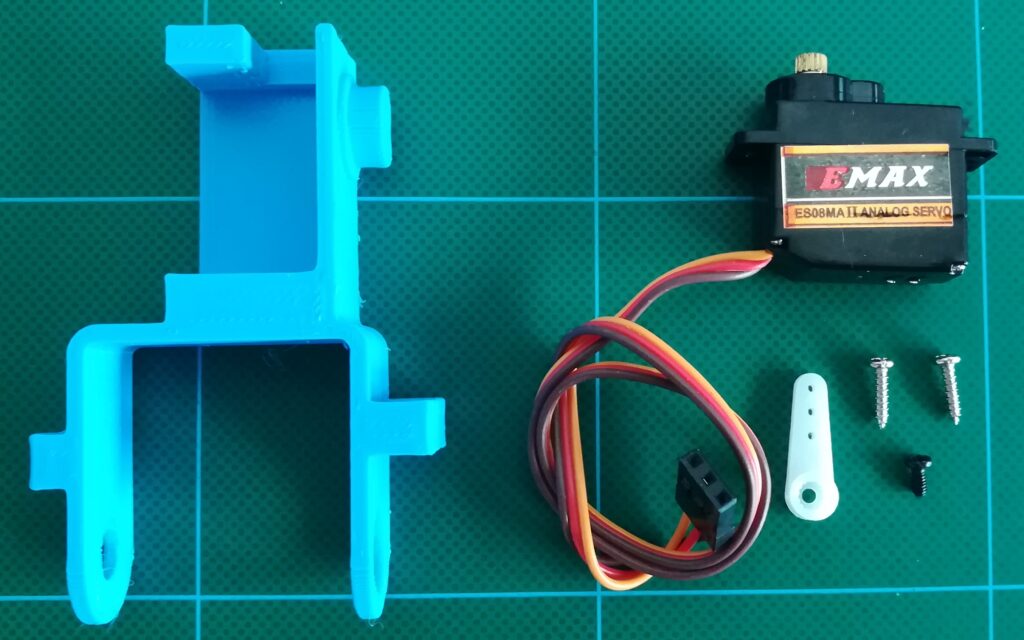
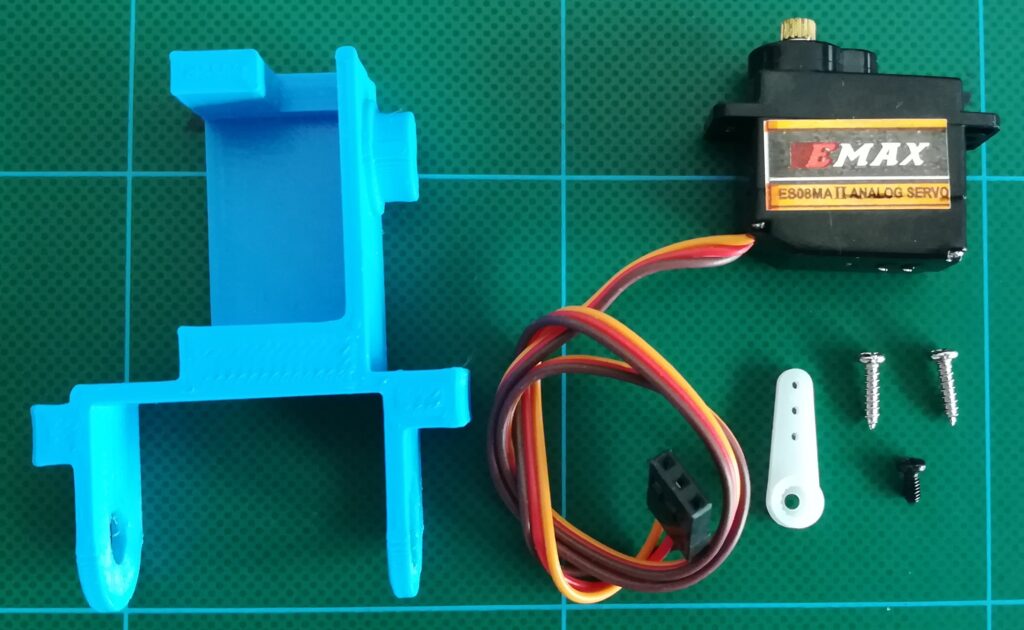
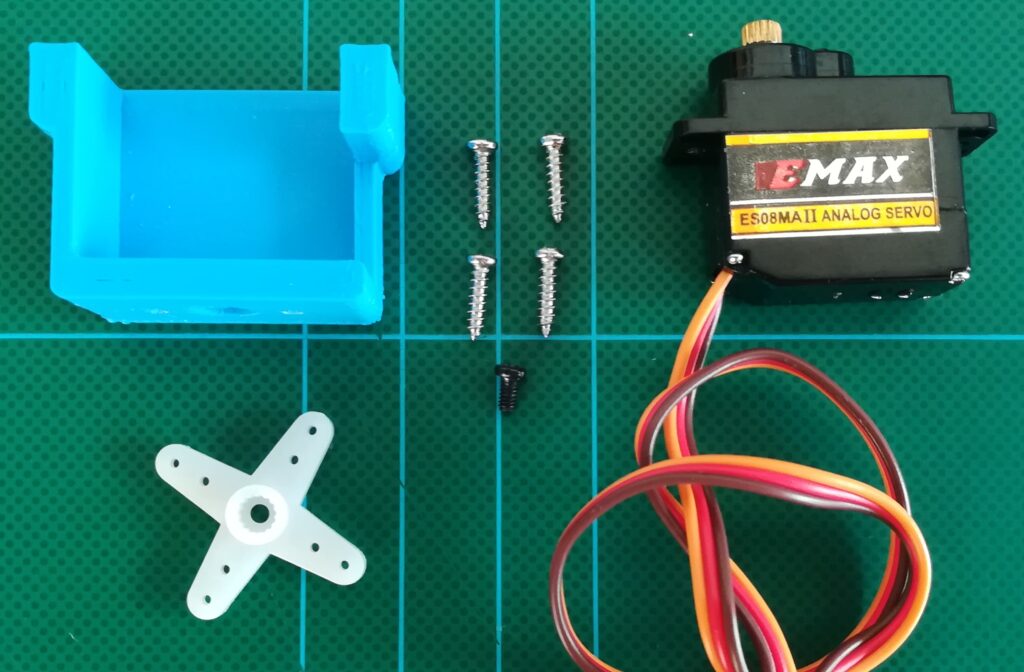
Iniziamo il montaggio con i seguenti pezzi:
 Per fissare la base del robot al piedistallo occorreranno 4 viti M3x16, 8 rondelle e 4 dadi M3, possibilmente autobloccanti così da non dover stringere forte il serraggio dei bulloni.
Per fissare la base del robot al piedistallo occorreranno 4 viti M3x16, 8 rondelle e 4 dadi M3, possibilmente autobloccanti così da non dover stringere forte il serraggio dei bulloni.
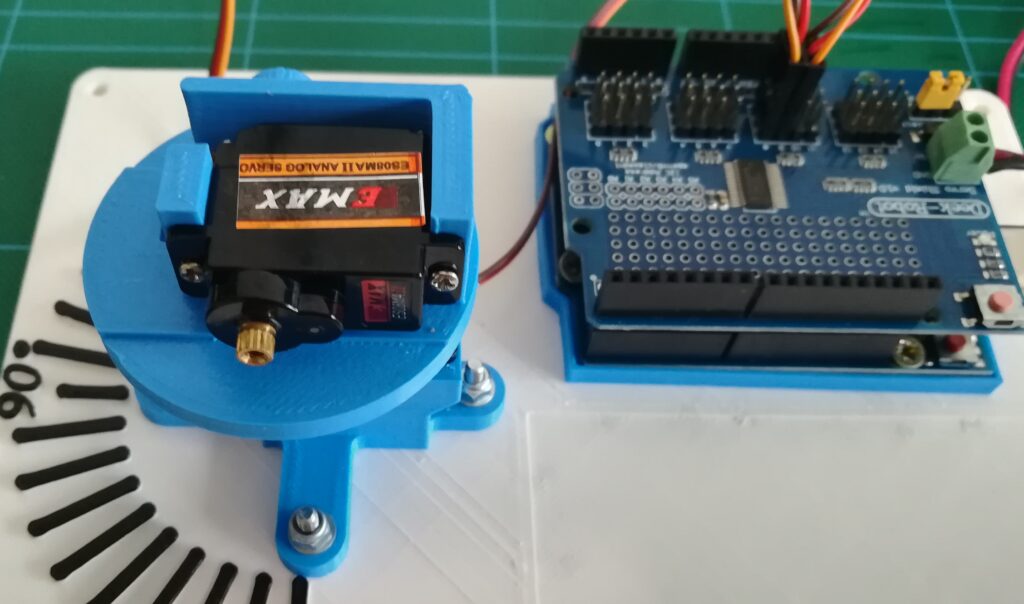
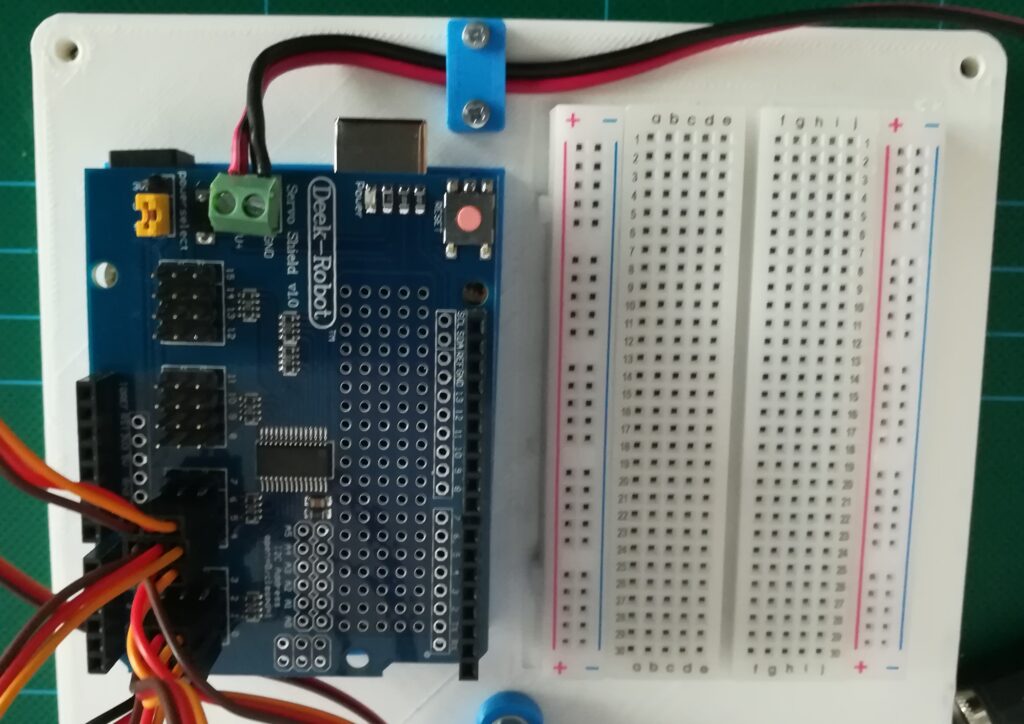
Per fissare l’Arduino si utilizzerà la sua apposita cornice e 4 viti M3x6.
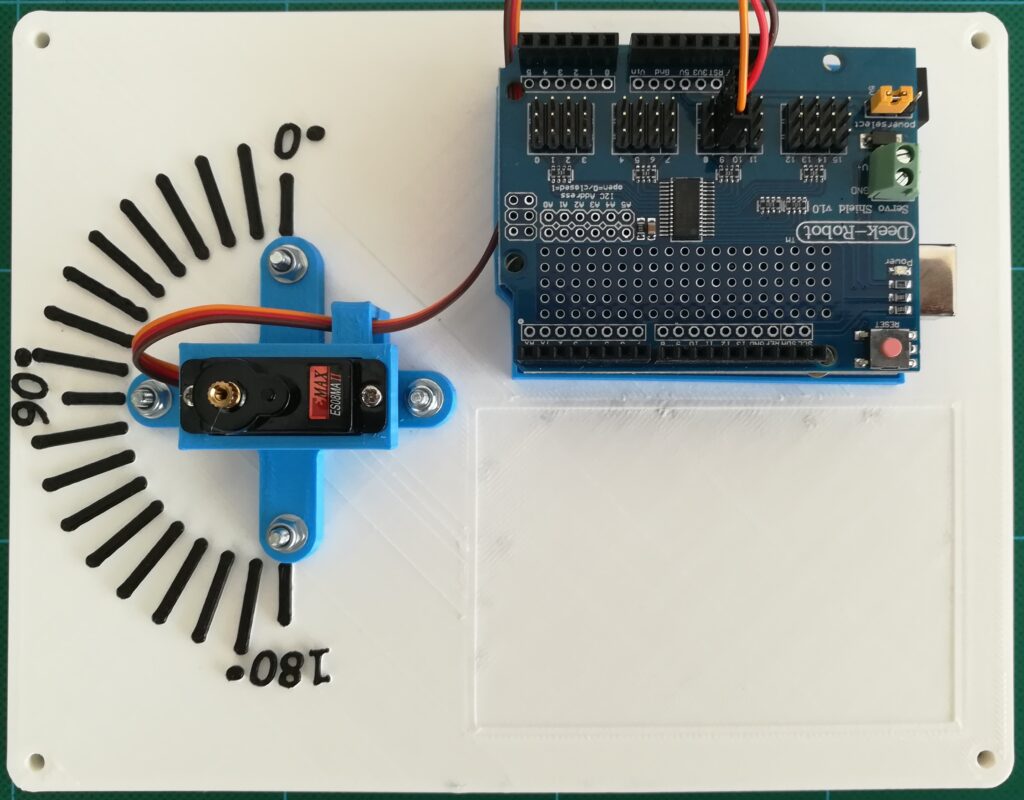
Infine montiamo il Servo Motore (facendo attenzione al verso) con le due viti date in dotazione e applichiamo sopra l’Arduino UNO la schield PCA9685.
Il risultato sarà il seguente:
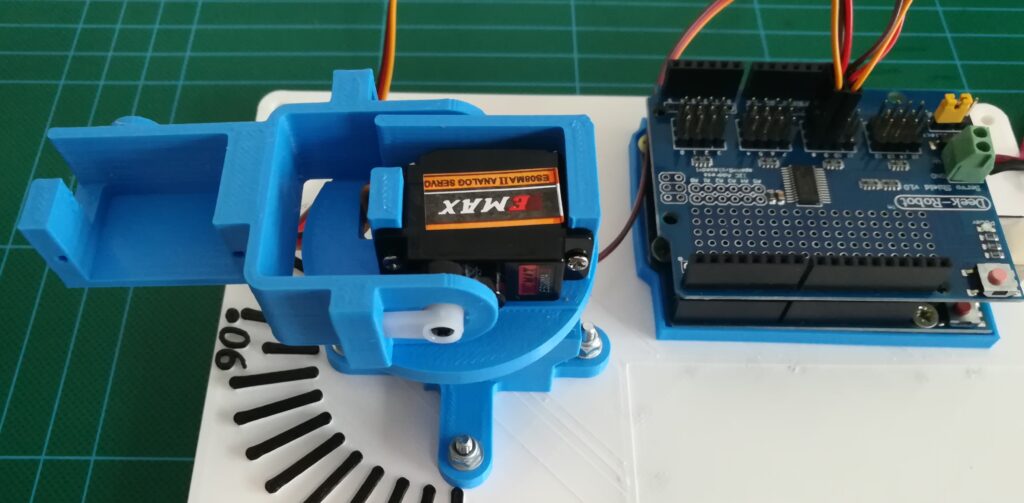
 Adesso montiamo la base rotante del Braccio Robotico con il supporto tondo per il Servomotore come visibile nella prossima foto:
Adesso montiamo la base rotante del Braccio Robotico con il supporto tondo per il Servomotore come visibile nella prossima foto:
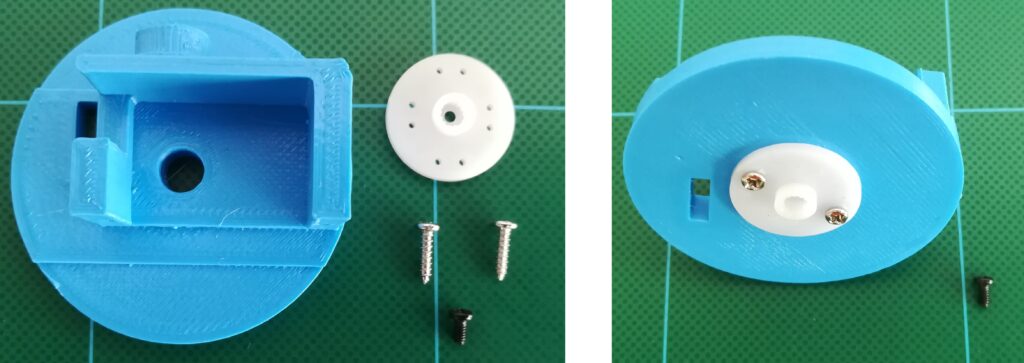 A questo punto montiamo la base rotante al Servomotore.
A questo punto montiamo la base rotante al Servomotore.
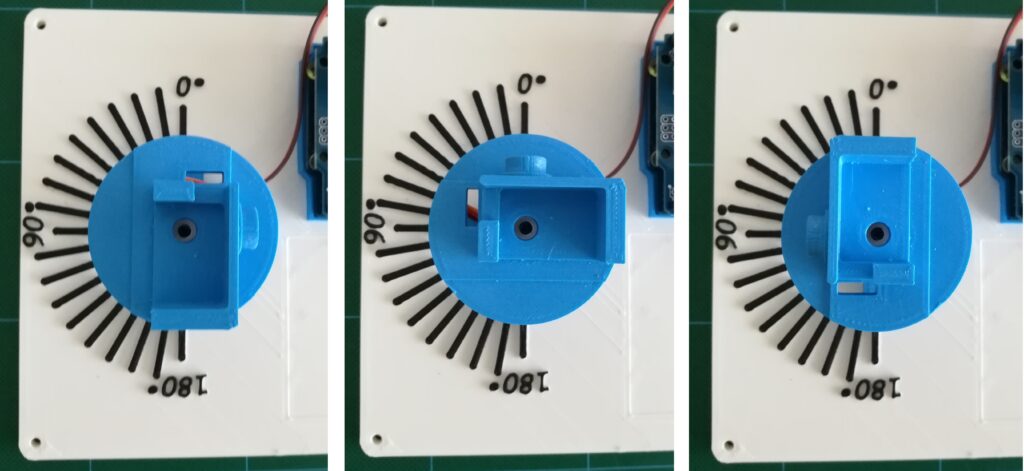
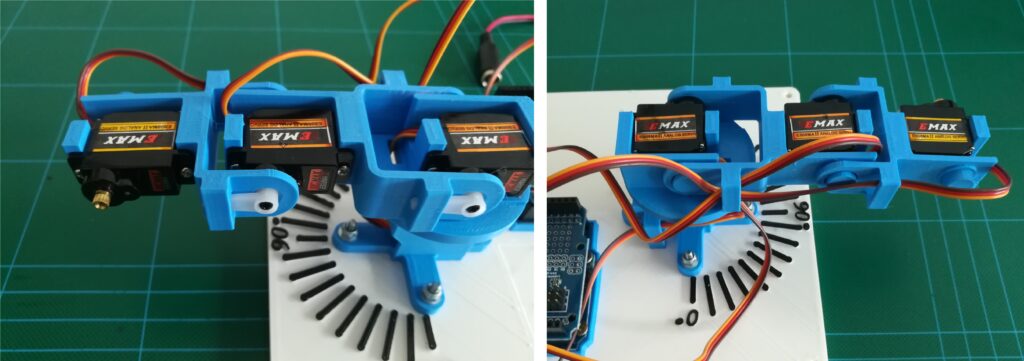
Prima di bloccarla definitivamente però si dovranno trovare i parametri min e max da inviare al motore in modo che la base rotante andrà a 0°, 90° e 180°.
Questi parametri andranno trovati per ogni motore che collegheremo alla scheda PCA9685.
Se volete capire il funzionamento della scheda PCA9685 potete leggere la nostra guida al seguente link:
https://www.makerslab.it/pca9685-controllo-i2c-a-16-canali-pwm-per-led-e-servomotori/
Alla fine di questa pagina è presente lo sketch per Arduino che noi abbiamo utilizzato per testare i motori e trovare i vari parametri di configurazione.
Una volta trovati i parametri le posizioni saranno le seguenti:
Ora iniziamo a montare i vari snodi del Braccio.
Ai prossimi motori si dovrà fare una piccola modifica:
 Si dovrà rimuovere con un taglierino il piccolo fermo in plastica vicino all’albero motore. Attenzione: dovra essere rimosso solo a quei motori che dovranno essere inseriti nei vari snodi.
Si dovrà rimuovere con un taglierino il piccolo fermo in plastica vicino all’albero motore. Attenzione: dovra essere rimosso solo a quei motori che dovranno essere inseriti nei vari snodi.
Ci sono due pezzi simili, iniziamo da quello più lungo:
 Applichiamo Il Servo Motore (questo è uno di quelli da modificare) alla base rotante montata precedentemente e facciamo passare il cavo nell’apposita asola presente nella base rotante:
Applichiamo Il Servo Motore (questo è uno di quelli da modificare) alla base rotante montata precedentemente e facciamo passare il cavo nell’apposita asola presente nella base rotante:
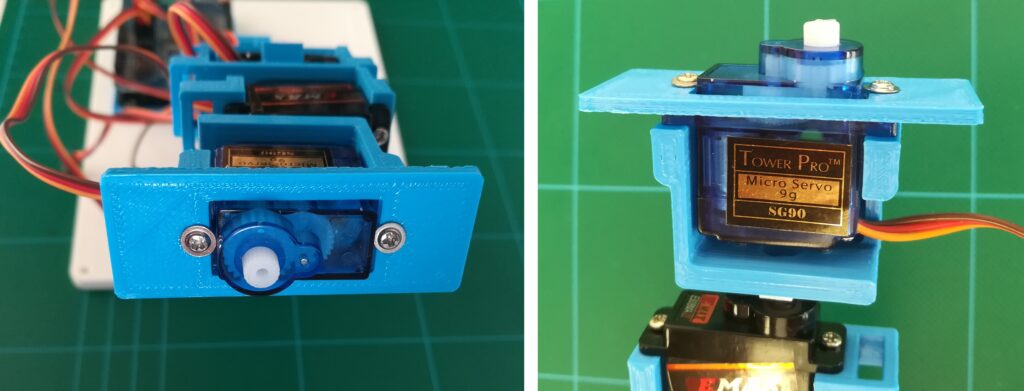
 A questo punto si dovrà montare il primo snodo:
A questo punto si dovrà montare il primo snodo:
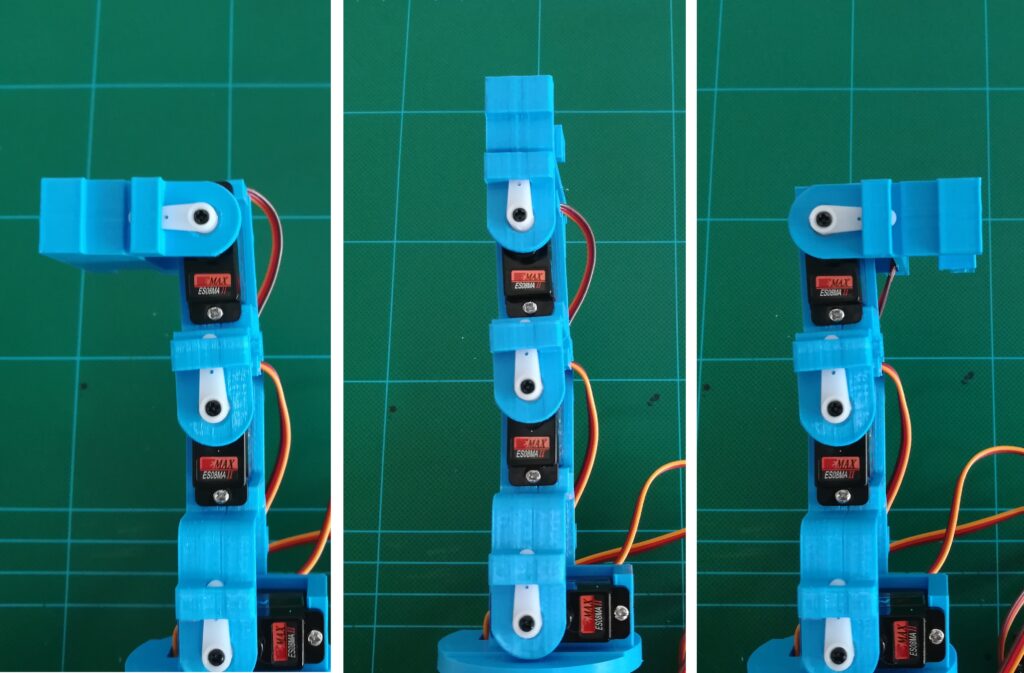
Prima di bloccarlo definitivamente, come indicato precedentemente, si dovranno trovare i parametri min e max da inviare al motore in modo che la parte possa andare a 0°, 90° e 180°:
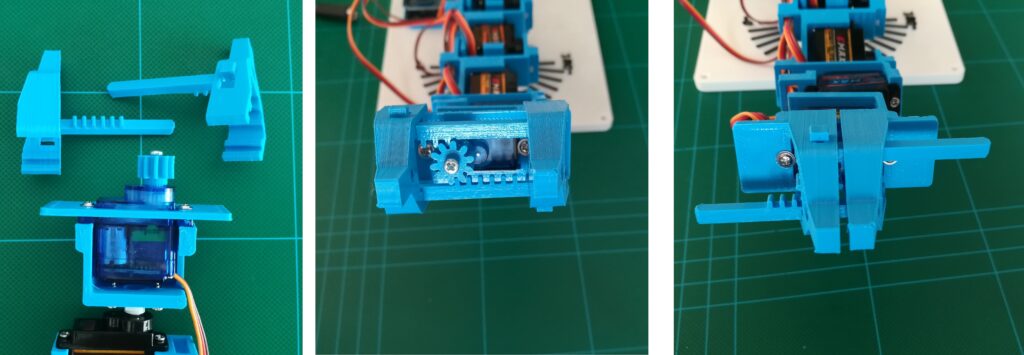
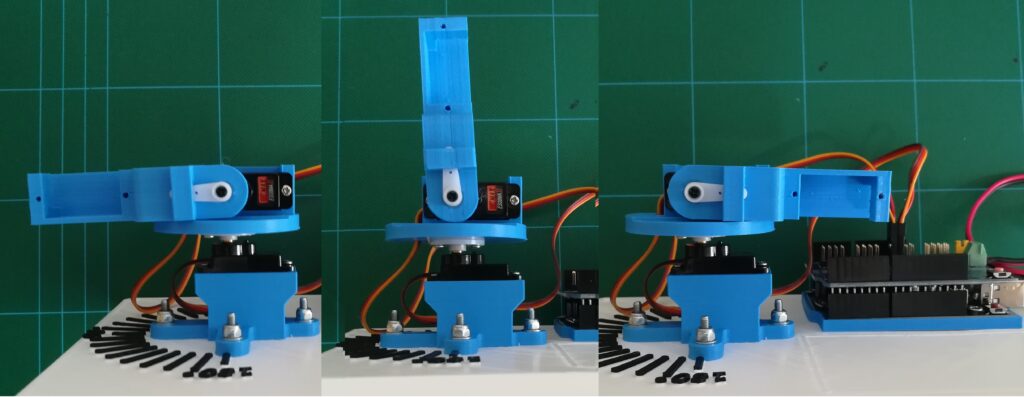 Ora è il turno del pezzo più corto dei due simili:
Ora è il turno del pezzo più corto dei due simili:
 Prima di tutto si monta il Servo Motore (anche questo è uno di quelli da modificare) sul pezzo precedentemente montato facendo passare il cavo nell’apposita asola:
Prima di tutto si monta il Servo Motore (anche questo è uno di quelli da modificare) sul pezzo precedentemente montato facendo passare il cavo nell’apposita asola:
 A questo punto si dovrà montare il secondo snodo e, anche in questo caso prima di bloccarlo definitivamente, si dovranno trovare i parametri min e max da inviare al motore in modo che la parte possa andare a 0°, 90° e 180°:
A questo punto si dovrà montare il secondo snodo e, anche in questo caso prima di bloccarlo definitivamente, si dovranno trovare i parametri min e max da inviare al motore in modo che la parte possa andare a 0°, 90° e 180°:
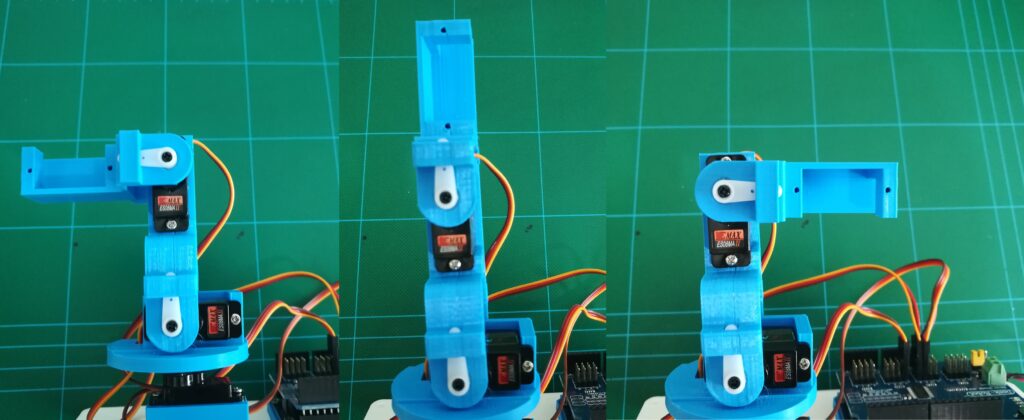
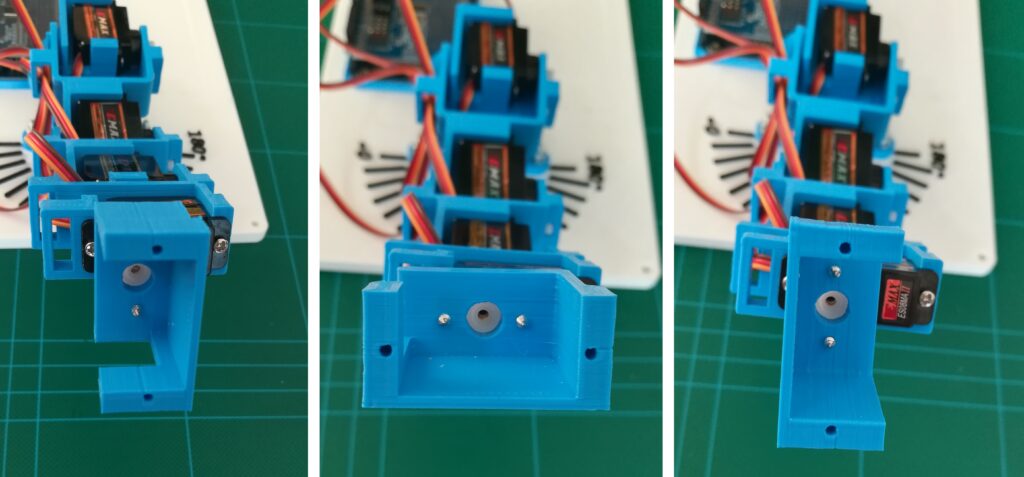
Adesso montiamo i seguenti pezzi:
 Prima di tutto si monta il Servo Motore (anche questo è uno di quelli da modificare) sul pezzo precedentemente montato facendo passare il cavo nelle apposite asole:
Prima di tutto si monta il Servo Motore (anche questo è uno di quelli da modificare) sul pezzo precedentemente montato facendo passare il cavo nelle apposite asole:
 Come al solito a questo punto si dovrà montare il terzo snodo e, anche in questo caso prima di bloccarlo definitivamente, si dovranno trovare i parametri min e max da inviare al motore in modo che la parte possa andare a 0°, 90° e 180°:
Come al solito a questo punto si dovrà montare il terzo snodo e, anche in questo caso prima di bloccarlo definitivamente, si dovranno trovare i parametri min e max da inviare al motore in modo che la parte possa andare a 0°, 90° e 180°:
 Adesso montiamo i seguenti pezzi:
Adesso montiamo i seguenti pezzi:
 Prima di tutto si monta il Servo Motore (questo non dovrà essere modificato) sul pezzo precedentemente montato, come visibile nella prossima foto, facendo passare il cavo nelle apposite asole:
Prima di tutto si monta il Servo Motore (questo non dovrà essere modificato) sul pezzo precedentemente montato, come visibile nella prossima foto, facendo passare il cavo nelle apposite asole:
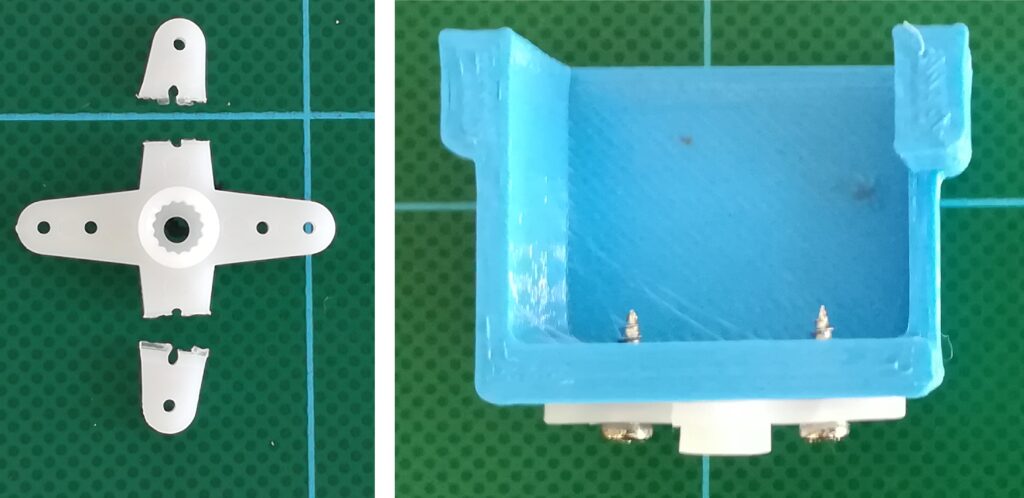
 Prima di montare il supporto a croce per il Servo Motore dovrà essere modificato come visibile nella prossima foto:
Prima di montare il supporto a croce per il Servo Motore dovrà essere modificato come visibile nella prossima foto:
 Come al solito a questo punto prima di bloccare definitivamente il pezzo al suo Servo Motore, si dovranno trovare i parametri min e max da inviare al motore in modo che la parte possa andare a 0°, 90° e 180°:
Come al solito a questo punto prima di bloccare definitivamente il pezzo al suo Servo Motore, si dovranno trovare i parametri min e max da inviare al motore in modo che la parte possa andare a 0°, 90° e 180°:
 E’ ora giunto il momento di montare la pinza tramite i seguenti pezzi:
E’ ora giunto il momento di montare la pinza tramite i seguenti pezzi:
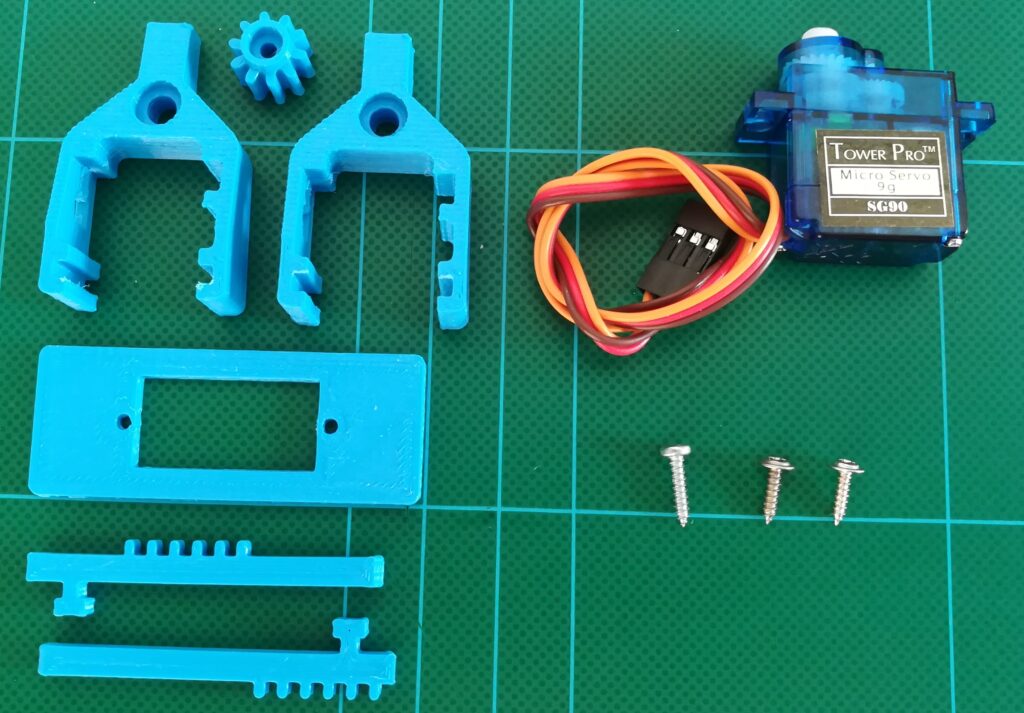
Si inizia fissando il servomotore e la parte piatta della pinza facendo attenzione all’ordine con il quale inserire i componenti:
 Anche il cavo di questo motore dovrà essere fatto passare dalle varie asole e, dato che alla fine risulterà corto e non arriverà alla nostra schield, applicheremo anche una apposita prolunga di 10 cm per Servo Motori.
Anche il cavo di questo motore dovrà essere fatto passare dalle varie asole e, dato che alla fine risulterà corto e non arriverà alla nostra schield, applicheremo anche una apposita prolunga di 10 cm per Servo Motori.
 Per poi passare alle montaggio delle griffe.
Per poi passare alle montaggio delle griffe.
Per questo motore si dovranno trovare i parametri min e max da inviare in modo che la pinza sia o chiusa o aperta (ma non troppo in modo da non farla smonatare).
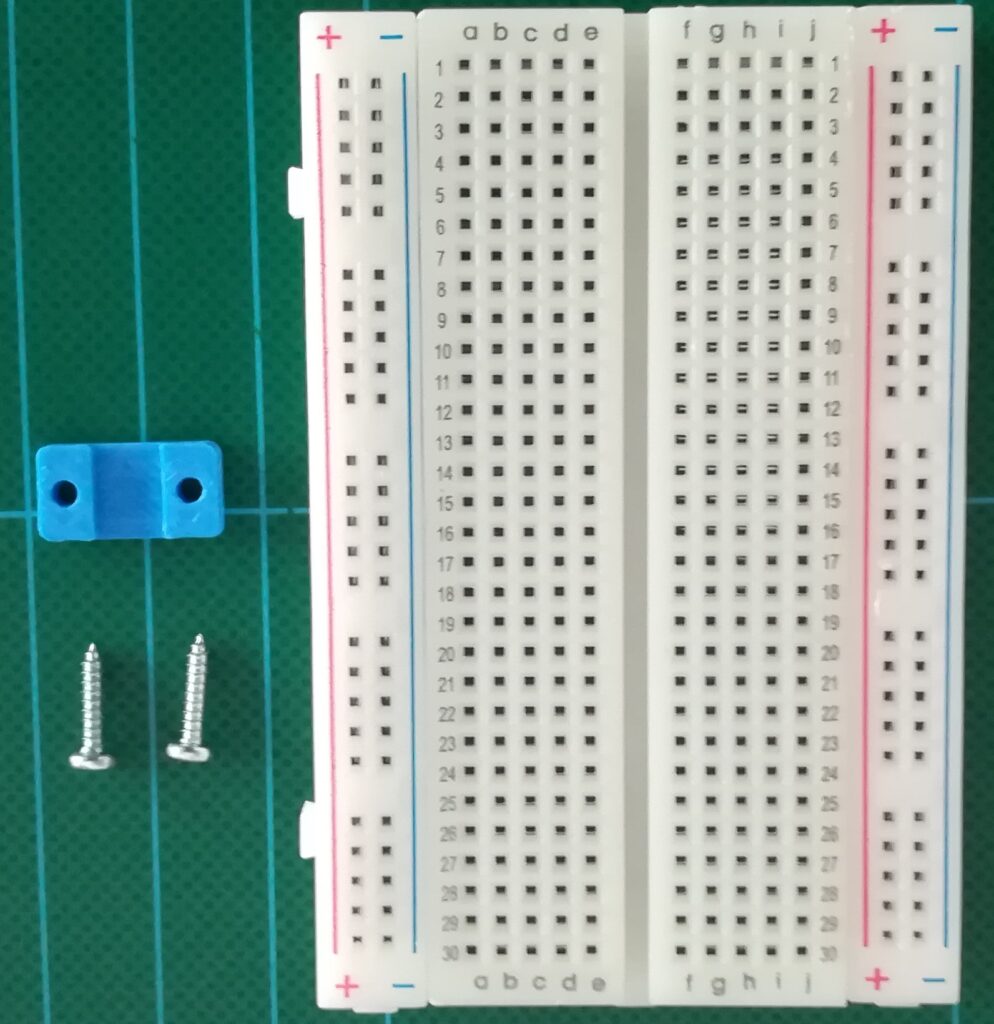
 Non ci resta che concludere il montaggio con la Breadboard ed il fermo per il cavo di alimentazione della schield:
Non ci resta che concludere il montaggio con la Breadboard ed il fermo per il cavo di alimentazione della schield:
 Come mostrato nella seguente foto:
Come mostrato nella seguente foto:
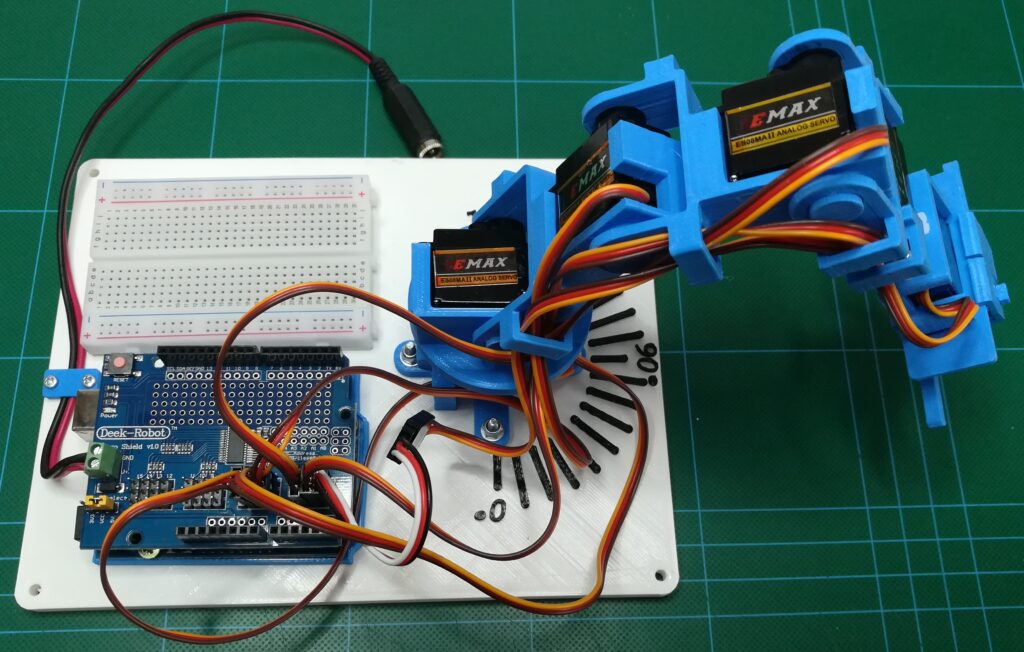
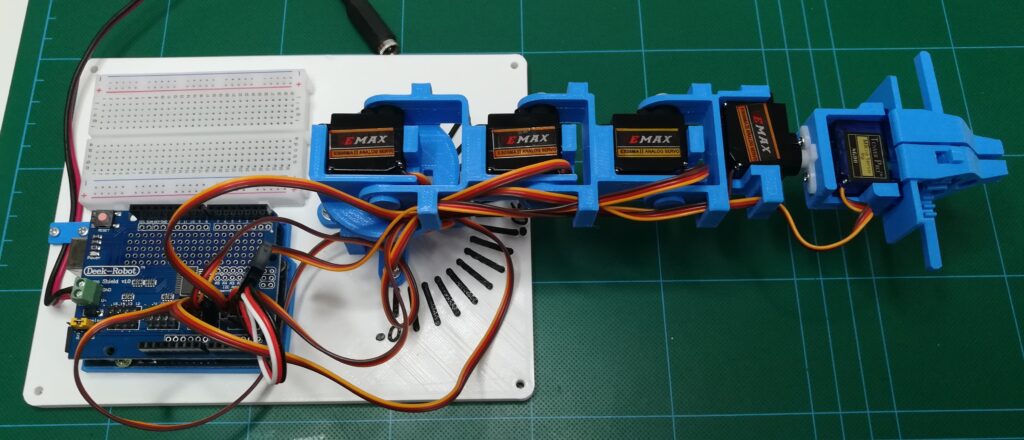
 Ecco il nostro Mini Braccio Robotico ARM con Arduino completamente montato:
Ecco il nostro Mini Braccio Robotico ARM con Arduino completamente montato:
Questo è lo sketch che abbiamo utilizzato per trovare i parametri dei servomotori da utilizzare con la libreria di Adafruit, la Adafruit PWM Servo Driver Library.
#include <Wire.h> #include <Adafruit_PWMServoDriver.h> // modificare il seguente rigo in base all'indirizzo i2c della propria scheda Adafruit_PWMServoDriver pwm = Adafruit_PWMServoDriver(0x40); // i parametri da inserire nella seguente scheda andranno trovati empiricamente #define SERVO_FREQ 50 // questi sono i valori degli impulsi minimi e massimi da dare ai servomotori dopo averli rilevati // Motore 10 - Base Rotante #define SERVO10MIN 130 #define SERVO10MAX 510 // Motore 11 - Spalla #define SERVO11MIN 125 #define SERVO11MAX 500 // Motore 12 - Gomito #define SERVO12MIN 130 #define SERVO12MAX 505 // Motore 13 - Polso #define SERVO13MIN 105 #define SERVO13MAX 475 // Motore 14 - Rotazione Pinza #define SERVO14MIN 105 #define SERVO14MAX 475 // Motore 15 - Pinza #define SERVO15MIN 110 #define SERVO15MAX 320 // variabili utilizzate per calcolare il segnale da inviare al servomotore in base ai parametri rilevati int lungImpulso10, lungImpulso11, lungImpulso12, lungImpulso13, lungImpulso14, lungImpulso15; void setup() { Serial.begin(9600); Serial.println("Test Braccio Robotico"); pwm.begin(); pwm.setOscillatorFrequency(27000000); pwm.setPWMFreq(SERVO_FREQ); delay(10); // il seguente rigo serve a calcolare la lunghezza dell'impulso da inviare al servomotore in base ai gradi scelti // basterà sostituire il 90 con il valore in gradi della posizione in cui dovrà andare il servomotore lungImpulso10 = map(90, 0, 180, SERVO10MIN, SERVO10MAX); // il seguente rigo invia l'impulso calcolato al servomotore scelto pwm.setPWM(10, 0, lungImpulso10); lungImpulso11 = map(90, 0, 180, SERVO11MIN, SERVO11MAX); pwm.setPWM(11, 0, lungImpulso11); lungImpulso12 = map(90, 0, 180, SERVO12MIN, SERVO12MAX); pwm.setPWM(12, 0, lungImpulso12); lungImpulso13 = map(90, 0, 180, SERVO13MIN, SERVO13MAX); pwm.setPWM(13, 0, lungImpulso13); lungImpulso14 = map(90, 0, 180, SERVO14MIN, SERVO14MAX); pwm.setPWM(14, 0, lungImpulso14); lungImpulso15 = map(90, 0, 180, SERVO15MIN, SERVO15MAX); pwm.setPWM(15, 0, lungImpulso15); delay(2000); } void loop() { /* elenco servomotori connessi servo su connettore 10 - Base rotante servo su connettore 11 - Spalla servo su connettore 12 - Gomito servo su connettore 13 - Polso servo su connettore 14 - Rotazione Pinza servo su connettore 15 - Pinza */ // numero del servomotore da testare int motore = 14; // valore minimo da trovare int SERVOMIN = 105; // valore massimo da trovare int SERVOMAX = 475; int posizione; // posiziona il servo a 0 gradi posizione = map(0, 0, 180, SERVOMIN, SERVOMAX); pwm.setPWM(motore, 0, posizione); Serial.println("Posizione 0"); Serial.print("Valore "); Serial.println(posizione); delay(3000); // posiziona il servo a 90 gradi posizione = map(90, 0, 180, SERVOMIN, SERVOMAX); pwm.setPWM(motore, 0, posizione); Serial.println("Posizione 90"); Serial.print("Valore "); Serial.println(posizione); delay(6000); // posiziona il servo a 180 gradi posizione = map(180, 0, 180, SERVOMIN, SERVOMAX); pwm.setPWM(motore, 0, posizione); Serial.println("Posizione 180"); Serial.print("Valore "); Serial.println(posizione); delay(3000); // posiziona il servo a 90 gradi posizione = map(90, 0, 180, SERVOMIN, SERVOMAX); pwm.setPWM(motore, 0, posizione); Serial.println("Posizione 90"); Serial.print("Valore "); Serial.println(posizione); delay(6000); }
—