
Makerslab Arm Robot Control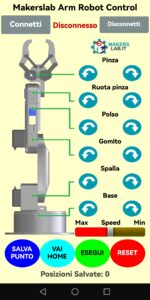 Clicca sull’immagine per scaricare l’app da Google Play Store
Clicca sull’immagine per scaricare l’app da Google Play Store
Con questa applicazione potrete controllare i nostri bracci robotici dotati di moduli Bluetooth HC-05 o HC-06 e scheda Arduino.
Le istruzioni sul montaggio e la programmazione dei nostri Bracci Robotici li potrete trovare nella nostra area progetti.
ISTRUZIONI RAPIDE:
Prima di utilizzare questa applicazione si dovrà effettuare l’accoppiamento del modulo Bluetooth con il proprio dispositivo Android.
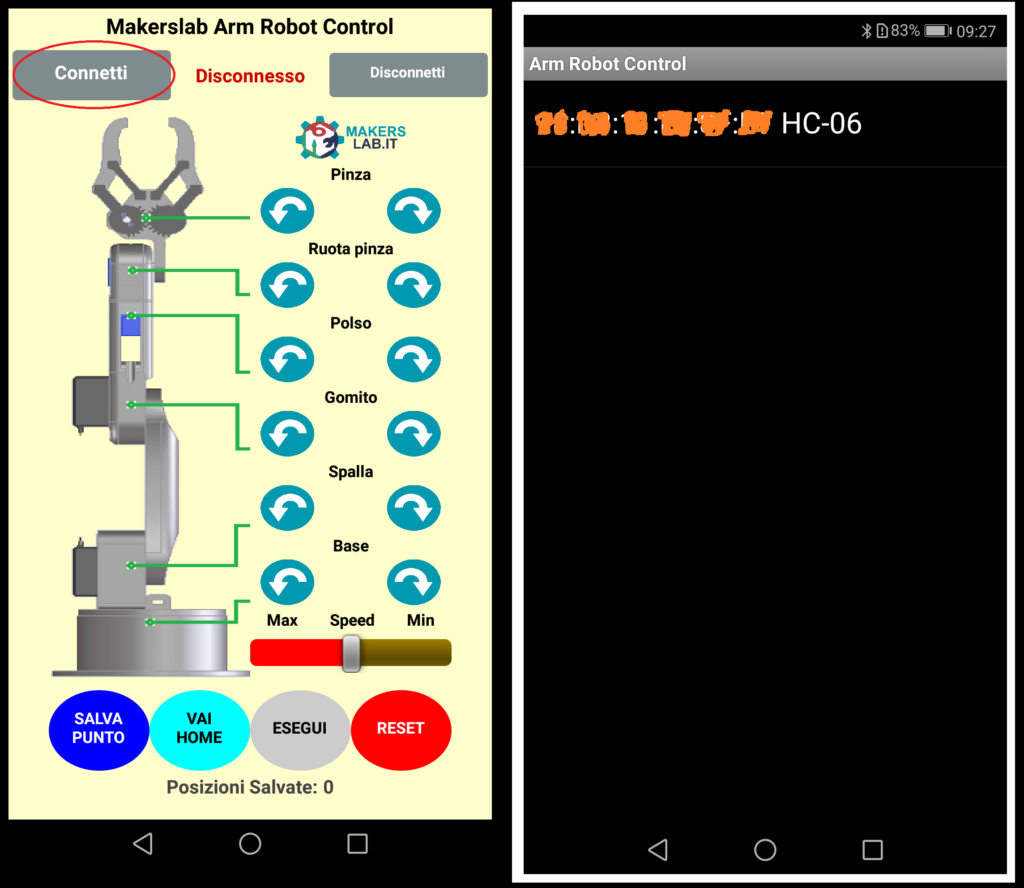
Una volta associato aprire l’applicazione “Makerslab Arm Robot Control”, fare tap su “Connetti” e selezionare il Modulo Bluetooth precedentemente associato.
————
Comandi → Lettere associate
Apertura Pinza → S
Chiusura Pinza → s
Rotazione Pinza + → C
Rotazione Pinza – → c
Rotazione Polso + → Q
Rotazione Polso – → q
Rotazione Gomito + → T
Rotazione Gomito – → t
Rotazione Spalla + → D
Rotazione Spalla – → d
Rotazione Base + → U
Rotazione Base – → u
Controllo Velocità → 0 .. 9
Salva Punto → X
Vai Home → H
Esegui → E
RESET → Z
ISTRUZIONI COMPLETE:
Accoppiamento modulo Bluetooth
Prima di utilizzare l’App sarà necessario fare l’accoppiamento Bluetooth del braccio con lo Smartphone (Nota: questa operazione sarà necessaria solo la prima volta che si utilizza un determinato Smartphone, o se si è rimosso il dispositivo Bluetooth dai dispositivi associati allo Smartphone).
Le seguenti schermate potrebbero variare in base al modello di Smartphone e alla versione di Android.
– Accendere Il Braccio Robotico
– Abilitare la connessione Bluetooth
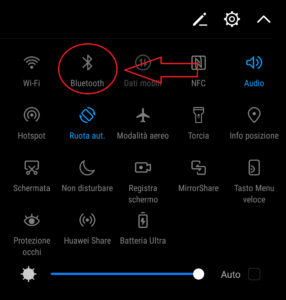 – Entrare nella configurazione del Bluetooth ed effettuare la scansione dei dispositivi Bluetooth nelle vicinanze.
– Entrare nella configurazione del Bluetooth ed effettuare la scansione dei dispositivi Bluetooth nelle vicinanze.
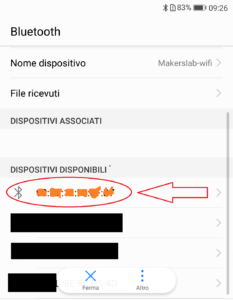 Selezionare il modulo Bluetooth del proprio Robot (Nota: il codice visualizzato è univoco per ogni dispositivo Bluetooth, annotarsi il proprio per associazioni future su altri Smartphone, soprattutto per poterlo riconoscere in ambienti con molti altri dispositivi come fiere ed eventi.)
Selezionare il modulo Bluetooth del proprio Robot (Nota: il codice visualizzato è univoco per ogni dispositivo Bluetooth, annotarsi il proprio per associazioni future su altri Smartphone, soprattutto per poterlo riconoscere in ambienti con molti altri dispositivi come fiere ed eventi.)
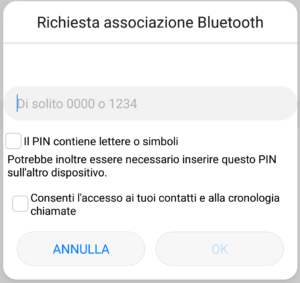
Una volta selezionato verrà chiesto il codice di associazione che è: 1234.
A questo punto il modulo Bluetooth del braccio sarà associato allo Smartphone e potrà essere utilizzato con l’apposita App.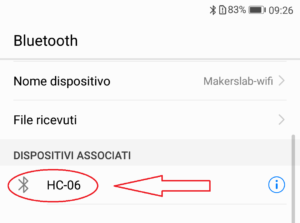 Connessione dell’app al Braccio Robotico
Connessione dell’app al Braccio Robotico
– Abilitare la comunicazione Bluetooth sullo Smartphone.
– Aprire l’app “Makerslab Arm Robot Control”
 – Cliccando sul pulsante “connetti” per connettere lo Smartphone al robot si aprirà la lista dei dispositivi associati allo Smartphone.
– Cliccando sul pulsante “connetti” per connettere lo Smartphone al robot si aprirà la lista dei dispositivi associati allo Smartphone.
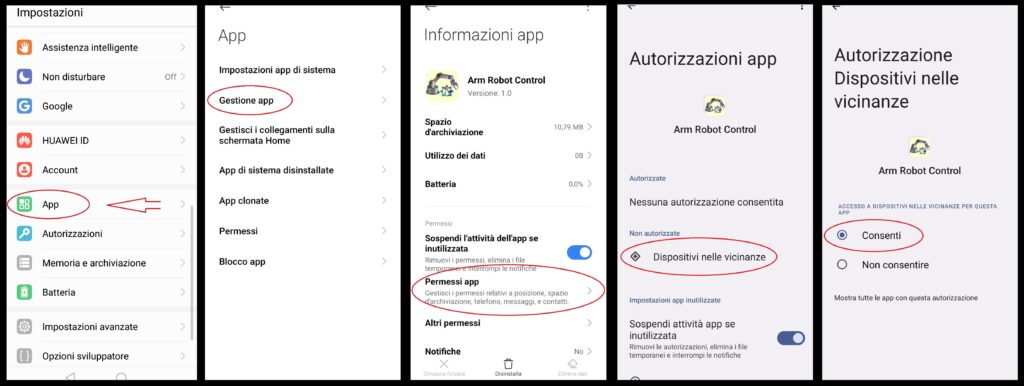
 Attenzione: se è la prima volta che si utilizza l’app e se a questo punto non dovese comparire l’elenco dei dispositivi associati, potrebbe essere necessario prima dare le opportune autorizzazioni.
Attenzione: se è la prima volta che si utilizza l’app e se a questo punto non dovese comparire l’elenco dei dispositivi associati, potrebbe essere necessario prima dare le opportune autorizzazioni.
– Chiudere l’app
– Andare nelle impostazioni dello Smartphone

– Andare su App à Gestione app à selezionare l’app “Arm Robot Control” à Andare su Permessi app à dispositivi nelle vicinanze à dare l’autorizzazione.
 A questo punto riaprendo l’app e cliccando nuovamente su connetti comparirà l’elenco dei dispositivi associati.
A questo punto riaprendo l’app e cliccando nuovamente su connetti comparirà l’elenco dei dispositivi associati.
Selezionare quello giusto ed attendere la connessione al Robot.
Quando connesso apparirà la scritta connesso
 Così il Braccio Robotico sarà pronto per essere utilizzato.
Così il Braccio Robotico sarà pronto per essere utilizzato.
Utilizzo dell’app
Il Braccio Robotico può funzionare in autonomia eseguendo un ciclo di movimenti preimpostati premendo il pulsantino di avvio ciclo anche senza essere connesso all’app (Nota: il pulsante sarà attivo solo quando il robot non starà eseguendo movimenti).
Per programmare i movimenti che dovrà eseguire il robot basterà muovere il braccio tramite gli appositi pulsanti che controllano i singoli motori, scegliendo anche la velocità con la quale verranno eseguiti.
Nota: La barra per regolare la velocità non avrà effetto sulla velocità dei movimenti eseguiti durante la programmazione. La velocità impostata dalla barra verrà applicata durante l’esecuzione del ciclo impostato manualmente.

Per salvare la posizione di tutti i motori e passare alla posizione successiva premere “SALVA PUNTO”
 Quando verrà premuto il contatore delle posizioni salvate incrementerà di uno.
Quando verrà premuto il contatore delle posizioni salvate incrementerà di uno.
Attenzione: quando il robot esegue il ciclo programmato si posizionerà da un punto all’altro interpolando e muovendo tutti i motori che avranno posizione diversa rispetto al punto precedente eseguito. Pensare bene alle traiettorie che eseguirà prima di salvare i punti.
Nota: I punti salvati non potranno essere cancellati, in caso di errori si dovrà resettare la programmazione e ricominciare da capo.
Durante la programmazione delle posizioni si potrà tornare nella posizione di Home con l’apposito pulsante “VAI HOME”
La posizione di HOME potrà essere salvata come punto a cui andare.
Quando si vuole eseguire il ciclo programmato premere il pulsante “ESEGUI”
A robot fermo potrà essere resettata la programmazione manuale e riposizionato il robot in posizione di HOME premendo il pulsante “RESET”